
 |
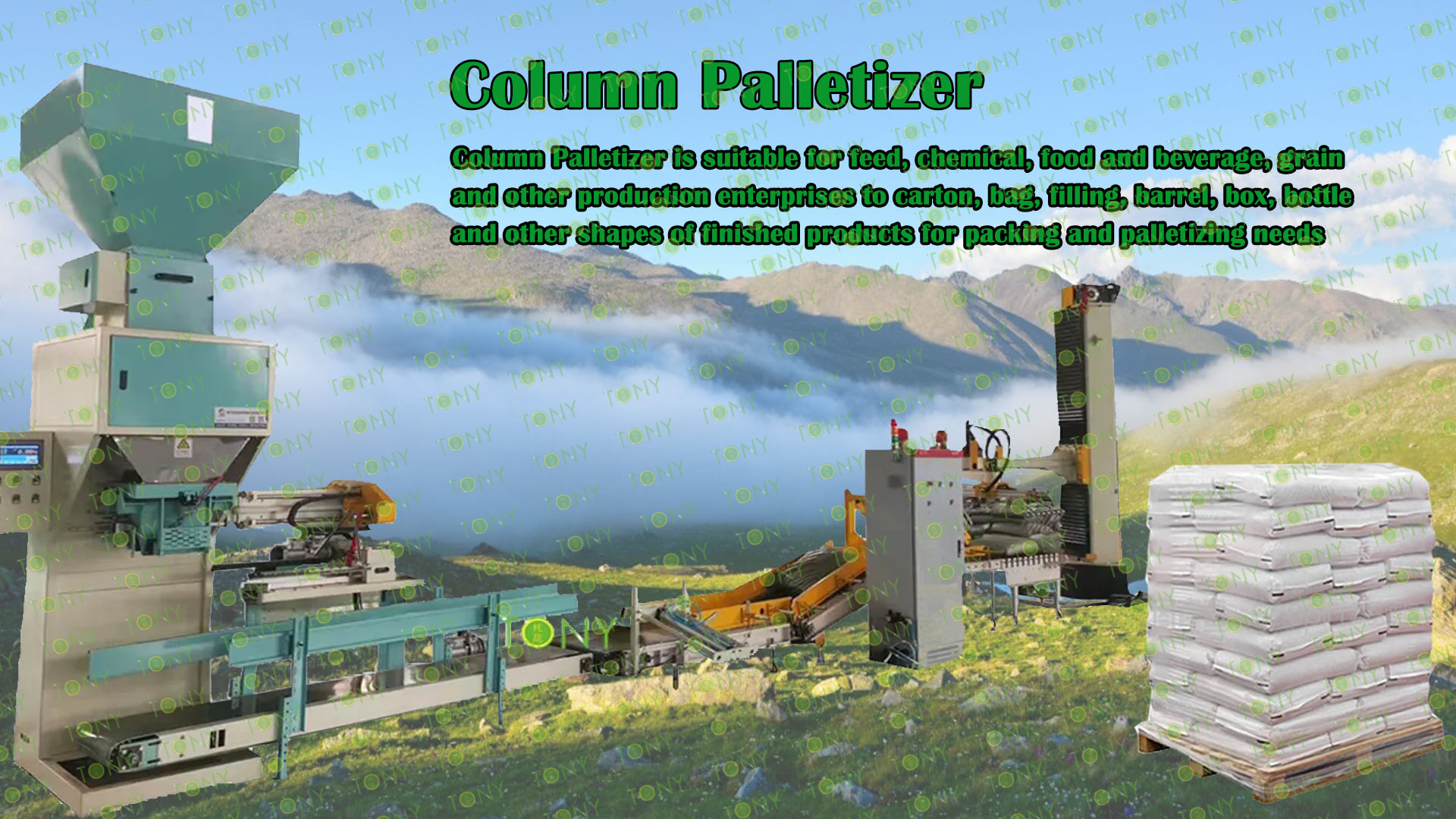
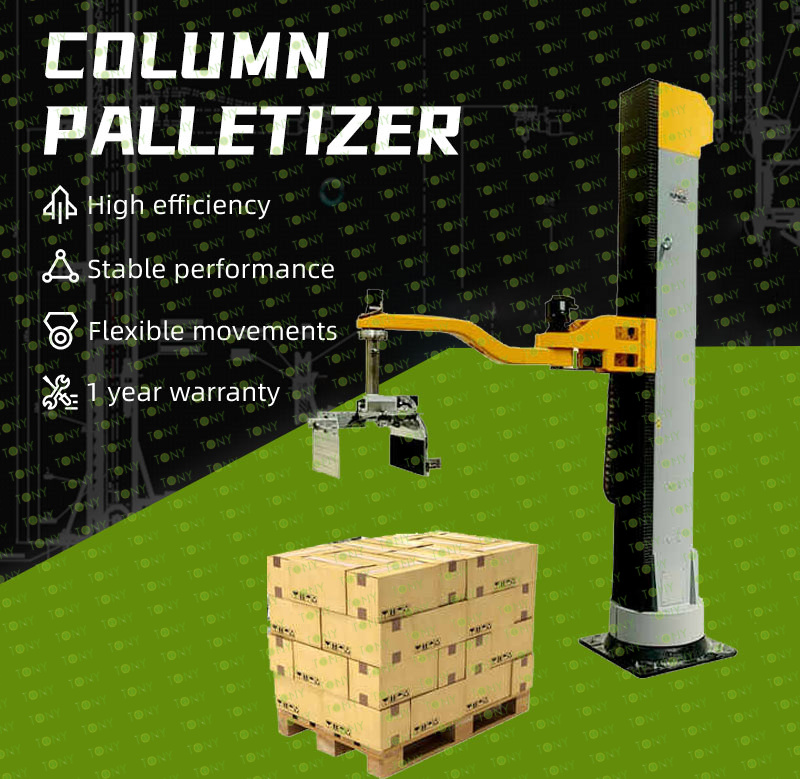
The TONY series column robots have unique linear actuators, energy-saving and environmentally friendly arm designs, simple operation interfaces and customized grippers. They can provide customized professional robot solutions for different production lines and materials. Their excellent precision and speed, efficient and stable performance enable one robot to complete the palletizing requirements of multiple production lines at the same time. The robot has a load capacity of 50KG-80KG and is suitable for feed, chemical, grain and oil, food, building materials, daily chemicals, alcohol, beverages, medicine, home appliances, 3C electronics and other industries. |

|
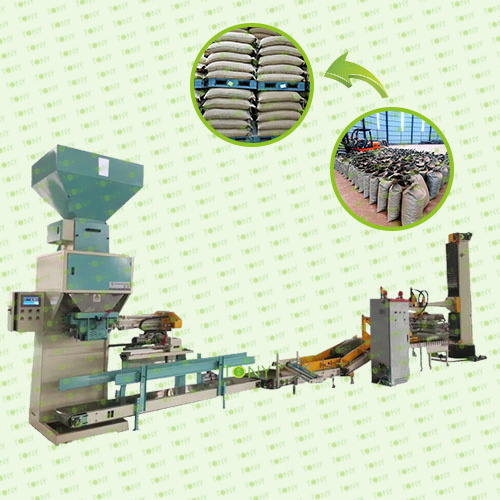
The Column Palletizer realizes point - to - point linear interpolation through the robot control system, making the movement smooth and fluent. Its working principle is as follows: 1.Material Transportation and Positioning: The packaged materials are transported to the designated palletizing area through the conveyor. These materials are then positioned. 2. Fixture Positioning: The robot moves the fixture to the top of the material positioning through the coordination of each axis. 3.Material Picking: When the material positioning signal is issued, the fixture moves downward through the servo - motor control. It then picks up the material. 4. Material Transportation and Placement: After picking up the material, the fixture transports it to the top of the palletizing position. This enables the material to reach the placement point. Subsequently, the material is stacked into the designated position. 5.Repeated Operation: Repeat the above actions until the whole pallet is completed. |
 |

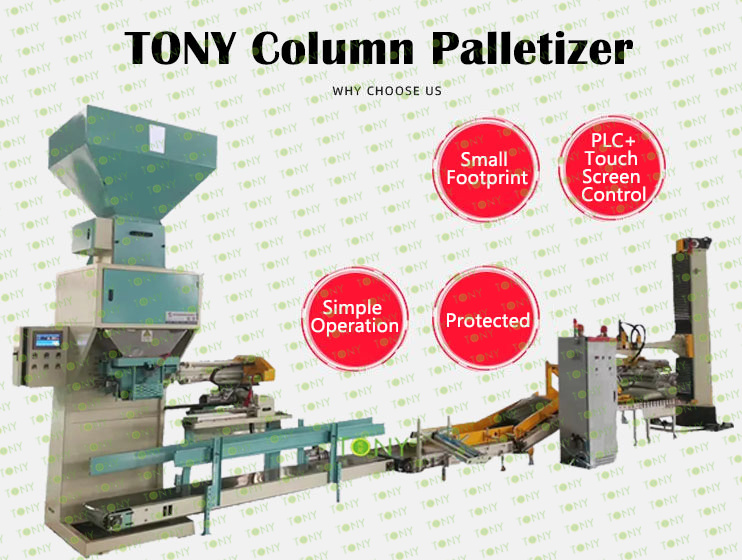 |
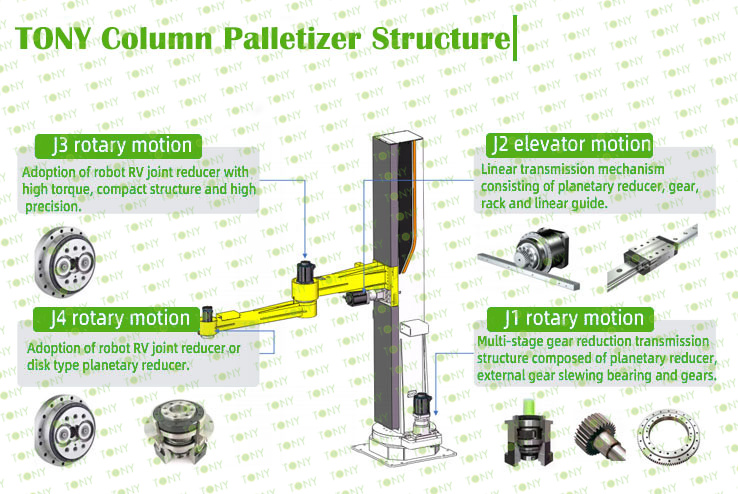
1. Unique Linear Actuator: The clever four-axis joint mechanism makes the robot motion program simpler and the control more precise. 2. Energy-Saving And Environmentally Friendly Robot Arm Design: The high-strength and reasonable production not only makes the arm movement more flexible, but also reduces energy loss. 3. Simple Teaching Operation And Friendly Graphical Operation Interface: There are few teaching positions and the operation interface is simple, making on-site debugging easier and greatly improving on-site efficiency. 4. Real-Time On-Site Monitoring: High-precision on-site motion simulation software can remotely understand whether the on-site program is operating normally, and automatically monitor interference to avoid interference collisions. 5. Pre-Layout On-Site Simulation: Using powerful 3D simulation/programming software, you can easily complete robot programming, layout, interference monitoring, on-site motion simulation and other series of work in the office, which becomes simple and effective, thereby greatly reducing the on-site debugging time and improving overall production efficiency. |


|
1 |
Palletizing capacity |
350-400 times/hour |
|
2 |
Palletizing layers |
5-10 layers |
|
3 |
Maximum stacking height |
1.9 meters |
|
4 |
Program storage Unlimited |
Unlimited |
|
5 |
Palletizing working time |
24 hours continuous operation |
|
6 |
Palletizing environment |
Meet the buyer's production environment |

 |
Strong continuous working ability: The vertical palletizer can work continuously for 8 hours and can replace 3-4 workers, thus saving labor costs. Strong Applicability: The vertical palletizer is suitable for a variety of scenarios and can be used for palletizing operations on multiple production lines. It has a small structure and occupies a small area. High Operation Accuracy: The vertical palletizer controls the movement of the gripper through a program, and the stacked pallet is firm and will not collapse, which is conducive to the transportation and storage management of the product. High Degree Of Automation: The vertical palletizer adopts full servo drive, with accurate movement, high operation accuracy, large working range, and an independent control system to ensure operation accuracy. High Cost Performance: The vertical palletizer is affordable, only one-third of the palletizing robot, and has low comprehensive application cost, low maintenance cost, and low failure rate. Simple Structure: The vertical palletizer has a simple structure and is easy to maintain. It only needs to lubricate the bearings regularly, which reduces maintenance costs. Long Service Life: Due to its mechanical structure, the vertical palletizer has a long service life and basically does not require complicated maintenance. |

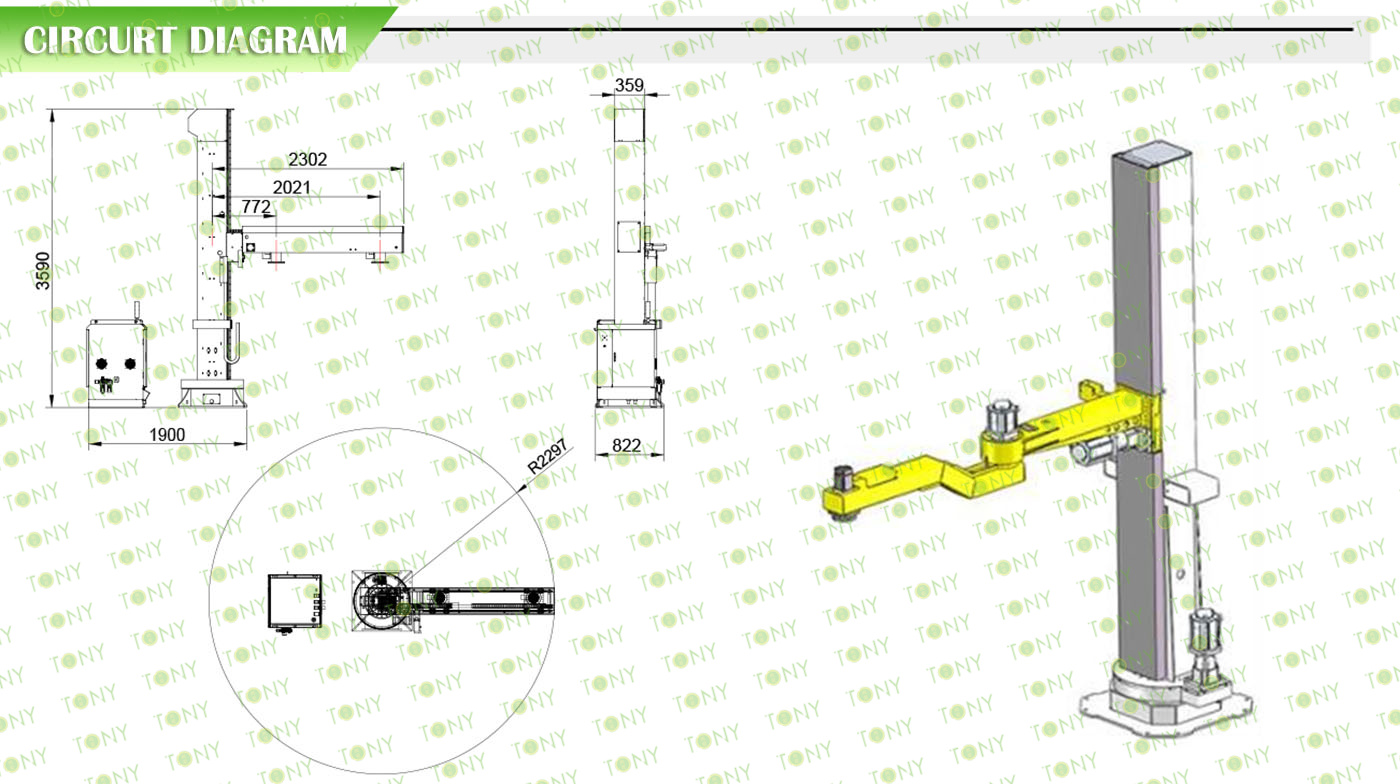
| Range of motion | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900mm | |
| J4 | ±240° | |
| Maximum load | 120KG | |
| Working capacity | 350-400 packages | |
| Power supply | 380V 50HZ three-phase four-wire | |
| Operating power | 5.7KW | |
| Main unit size | L3090mm×W1000mm×H3360mm(new model) | |
| Stacking height | 1900mm | |
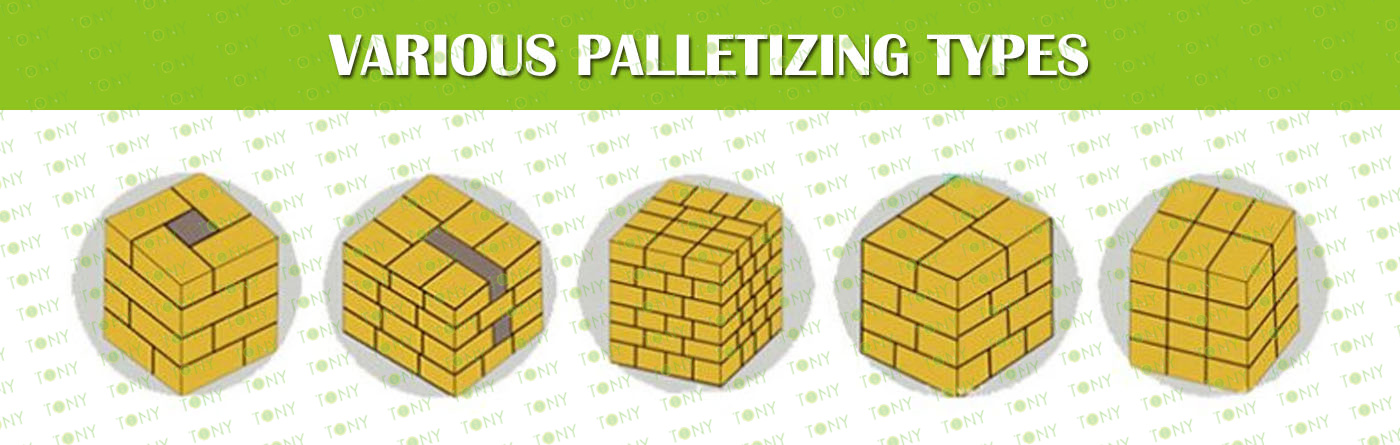
| Stacking shape | Five-flowered, six-flowered, etc. | |
| Air supply pressure | 0.6-0.8Mpa | |
| Equipment weight | 1400KG | |
| Palletizer name and model | GJ-LZ400 |
| Freedom of motion (axis) | 4 |
| Maximum load capacity (kg) | 80 |
| Repeat positioning accuracy (mm) | ±1mm |
| Drive mode | Servo drive |
| Carrier | Clamp |
| Palletizing memory | Intelligent memory |
| Maximum coverage (mm) | 2350 |
| Maximum coverage (mm) | 925 |

|
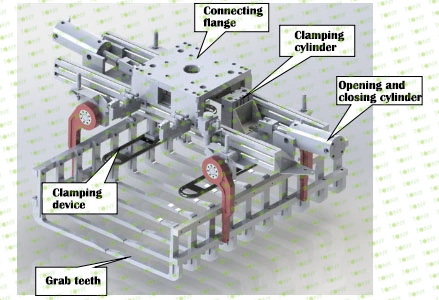
1. Gripper Type And Devices: It adopts a claw - finger type special bag gripper. It is equipped with a pneumatic clamping device and a pneumatic opening/closing device. 2. Frame Structure: The whole frame is made of aluminum profiles. It has a solid structure, ensuring a stable and reliable grasping process. 3. Adjustable Grab Teeth: The grab teeth on both sides of the gripper can be manually adjusted. This adjustment can meet the requirements of different - specification bags. 4. Grab Teeth Material and Spacing: The grab teeth are made of aluminum alloy. The grab teeth spacing is consistent with the center distance of the code machine roller. |
|
|
|
|

| Gripper structure | Claw finger type special bag gripper |
| Connection method with robot | Flange connection |
| Clamping device stroke (mm) | 150 |
| Opening/closing device stroke (mm) | 200 |
| Drive method | Cylinder drive |
| Pneumatic component brand configuration | Japan SMC |
| Applicable product specifications | Based on the product specifications provided by the customer |

|
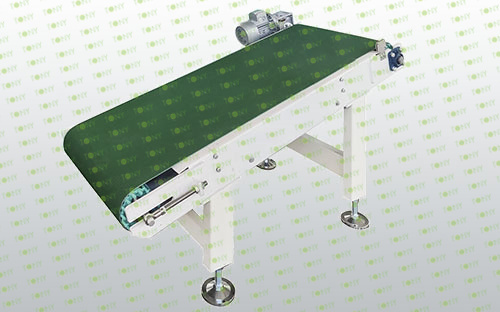
The climbing belt conveyor transports materials from a low place to the required height. It is mainly composed of a frame, conveyor belt, rollers, rollers, tensioning devices, transmission devices, etc. The frame is made of high-quality carbon steel, with a spray-coated surface, a solid and reliable structure, and a plate thickness of 3.5-4mm; Guide plates on both sides, the position of the guide plates can be adjusted; High-quality PVC belts are used for smooth transportation; Driven by a well-known domestic brand motor; About L1600×W650 (effective width)×H370~H900, height adjustable ±50mm; A photoelectric detection positioning device is set at the end of the conveyor; Photoelectric detection switch: Omron or equivalent brand The motor needs to be covered with a protective cover, which needs to be corrosion-resistant to prevent the material from corroding the motor |
||||||||||||||||||||||
| Related Configuration | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
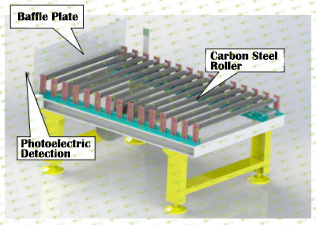
The Code-Waiting Roller Conveyor is used to locate and detect the material bag before grabbing, and provide the in-position signal to the robot for grabbing. The main structure and parameters are as follows: The frame is made of carbon steel profiles, the structure is firm and reliable, and the plate thickness is 3-4mm; The roller is made of sprocket carbon steel roller; It is driven by a well-known domestic brand motor; The conveying height is 900±50mm adjustable; The overall dimensions of the conveyor are approximately L1040×W650mm (effective width); A photoelectric detection in-position device is set at the end of the conveyor; Photoelectric detection switch: Omron or equivalent brand The motor needs to be covered with a protective cover, which needs to be corrosion-resistant to prevent the material from corroding the motor |
||||||||||||||||
| Related configuration | ||||||||||||||||
 |
|
|||||||||||||||

|
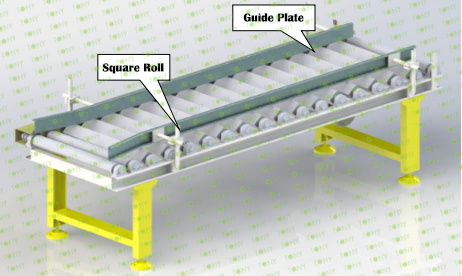
The square roller shaping conveyor uses the vibration generated by the square roller to evenly distribute the material in the bag and make the bag flat as a whole. The main structure and parameters are as follows: The frame is made of steel, the structure is firm and reliable, and the plate thickness is 3-4mm; The guide plates on both sides are made of carbon steel, and the position of the guide plates is adjustable; The conveyor rollers are made of carbon steel rollers with a smooth surface; It is driven by a well-known domestic brand motor; The conveying height is 900±50mm adjustable; The overall dimensions of the shaping conveyor are approximately L2000×W650mm (effective width of the roller); A photoelectric detection positioning device is set at the end of the conveyor; Photoelectric detection switch: Omron or equivalent brand The motor needs to be covered with a protective cover, which needs to be corrosion-resistant to prevent the material from corroding the motor. Appearance of the square roller shaping machine |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. Power Supply (Single Production Line) Power supply voltage: AC380V±10% 50HZ Control power supply: DC24V Power consumption: ~8KW |
2. Air Supply (Single Production Line) Standard instrument air Pressure: 0.4~0.6MPa Air consumption: 3~5 Nm3/H |
|
3. Environment Temperature: -10~+50℃ Humidity: ≤90% (no condensation) |
4. Floor Thickness: ≥18CM standard concrete |


|
24 Hours Online Service. -Inquiry will be replied within 2 hours. -All-the-way tracking service offered from placing order to delivery. -Free training for operation, debugging and daily maintenance. -We can provide professional guide installation. -One year warranty and all-round after-sales service. -Customized design and flow chart are available for our clients. -Independent R&D team and strict & scientific management system |
 |





2025 Tony Machinery - All Rights Reserved. Map