
 |
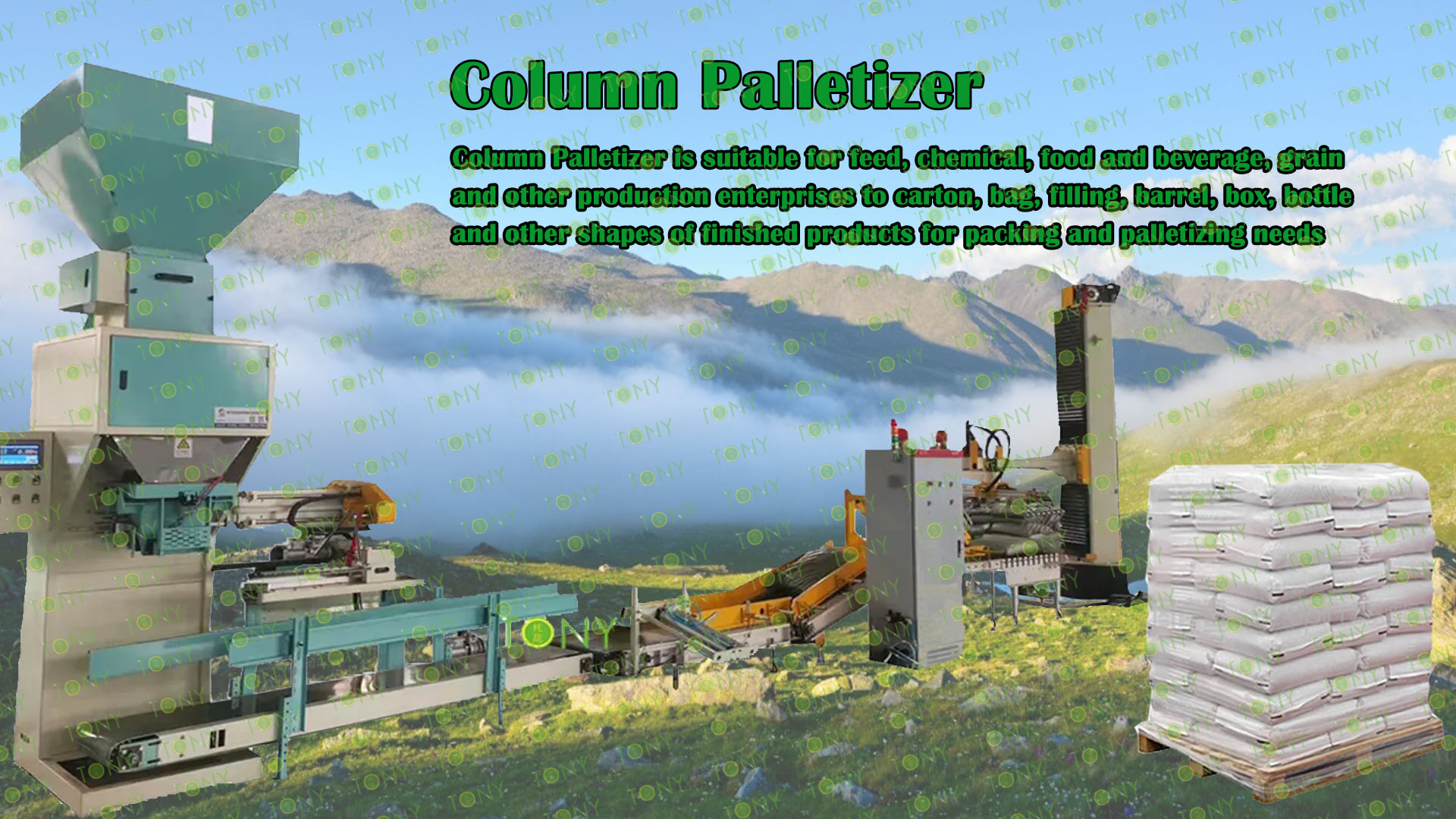
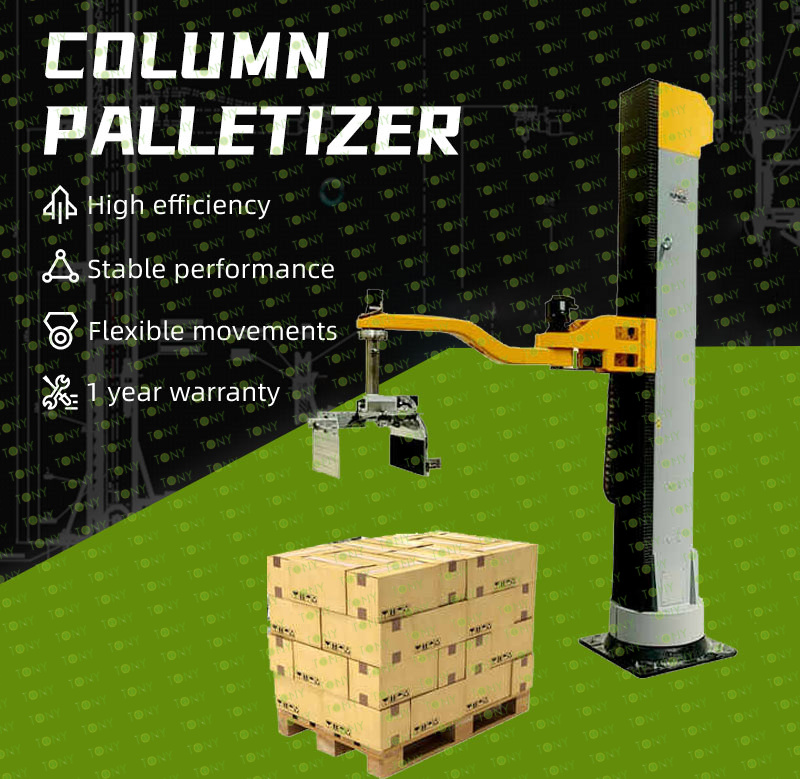
Tony Series Column Robot에는 독특한 선형 액추에이터, 에너지 절약 및 환경 친화적 인 팔 디자인, 간단한 작동 인터페이스 및 맞춤형 그리퍼가 있습니다. 다양한 생산 라인과 재료에 맞춤형 전문 로봇 솔루션을 제공 할 수 있습니다. 우수한 정밀도와 속도, 효율적이고 안정적인 성능을 통해 하나의 로봇은 여러 생산 라인의 팔레 키즈 요구 사항을 동시에 완료 할 수 있습니다. 로봇의 부하 용량은 50kg-80kg이며 사료, 화학 물질, 곡물 및 오일, 식품, 건축 자재, 일일 화학 물질, 알코올, 음료, 의약품, 가전 제품, 3C 전자 제품 및 기타 산업에 적합합니다. |

|
컬럼 팔레타이저는 로봇 제어 시스템을 통한 포인트 - 포인트 선형 보간을 인식하여 움직임이 부드럽고 유창하게 만듭니다. 작업 원칙은 다음과 같습니다. 1. 재료 운송 및 위치 : 포장 된 재료는 컨베이어를 통해 지정된 팔레 타이징 영역으로 운송됩니다. 그런 다음이 재료가 배치됩니다. 2. 고정물 포지셔닝 : 로봇은 각 축의 조정을 통해 고정물을 재료 포지셔닝의 상단으로 이동시킵니다. 3. 마수의 피킹 : 재료 위치 신호가 발행되면, 고정물은 서보 - 모터 제어를 통해 아래쪽으로 움직입니다. 그런 다음 재료를 선택합니다. 4. 재료 운송 및 배치 : 재료를 집어 올린 후 고정구는 팔레팅 위치의 상단으로 운반합니다. 이를 통해 재료가 배치 지점에 도달 할 수 있습니다. 그 후, 재료는 지정된 위치에 쌓입니다. 5. 반복 작업 : 전체 팔레트가 완료 될 때까지 위의 동작을 반복하십시오. |
 |

 |
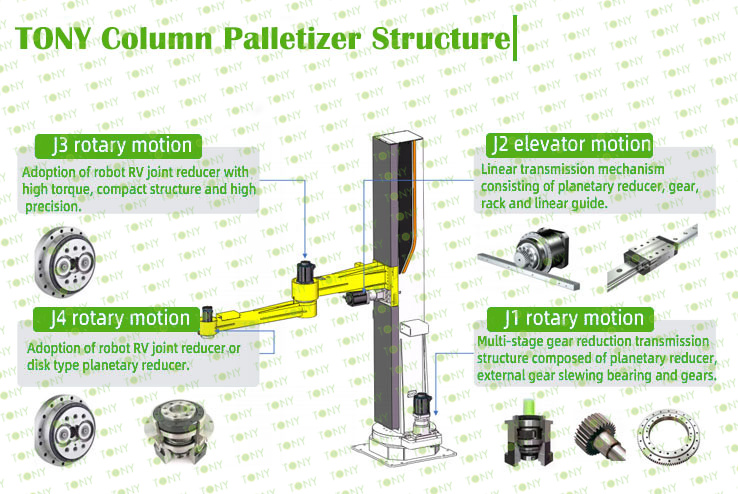
1. 독특한 선형 액추에이터 : 영리한 4 축 관절 메커니즘은 로봇 모션 프로그램을 더 간단하게 만들고 제어를보다 정확하게 만듭니다. 2. 에너지 절약 및 환경 친화적 인 로봇 팔 디자인 : 강도가 높고 합리적인 생산은 팔 움직임을보다 유연하게 만들뿐만 아니라 에너지 손실을 줄입니다. 3. 간단한 교육 작업 및 친절한 그래픽 작업 인터페이스 :교육 직책이 거의없고 운영 인터페이스는 간단하므로 현장 디버깅을보다 쉽고 현장 효율성을 크게 향상시킵니다. 4. 실시간 현장 모니터링 : 고정밀 현장 모션 시뮬레이션 소프트웨어는 현장 프로그램이 정상적으로 작동하는지 여부를 원격으로 이해하고 간섭 충돌을 피하기 위해 간섭을 자동으로 모니터링 할 수 있습니다. 5. 현장 시뮬레이션 전 시뮬레이션 : 강력한 3D 시뮬레이션/프로그래밍 소프트웨어를 사용하면 로봇 프로그래밍, 레이아웃, 간섭 모니터링, 현장 모션 시뮬레이션 및 기타 일련의 작업 작업을 쉽게 완료 할 수있어 간단하고 효과적이어서 현장 디버깅 시간을 크게 줄이고 전반적인 생산 효율성을 향상시킬 수 있습니다. |


|
1 |
팔레트 화 용량 |
시간/시간 350-400 번 |
|
2 |
Palletizing 층 |
5-10 층 |
|
3 |
최대 스태킹 높이 |
1.9 미터 |
|
4 |
프로그램 저장 무제한 |
제한 없는 |
|
5 |
근무 시간을 팔레 화합니다 |
24 시간 연속 작동 |
|
6 |
팔레타이 화 환경 |
구매자의 생산 환경을 만나십시오 |

 |
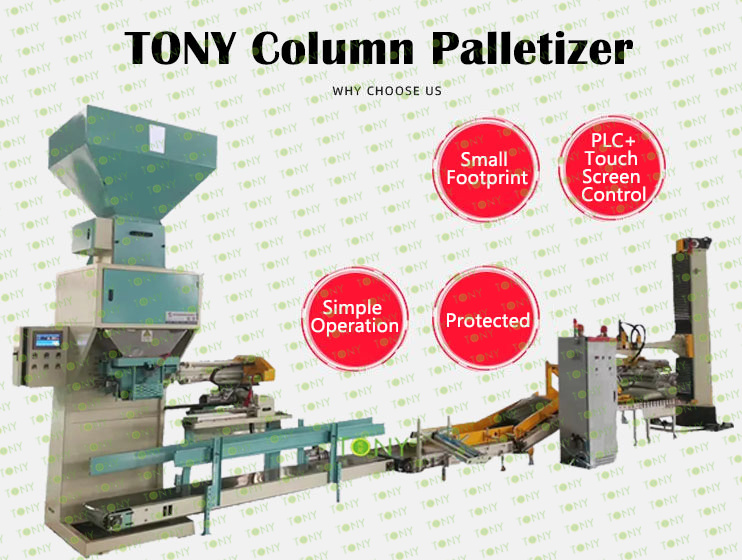
강력한 지속적인 작업 능력 : 수직 팔레타이저는 8 시간 동안 지속적으로 작동하여 3-4 명의 근로자를 대체하여 인건비를 절약 할 수 있습니다. 강력한 적용 가능성 : 수직 팔레타이저는 다양한 시나리오에 적합하며 여러 생산 라인에서 팔레잉 작업에 사용할 수 있습니다. 작은 구조가 있으며 작은 지역을 차지합니다. 높은 작동 정확도 : 수직 팔레타이저는 프로그램을 통해 그리퍼의 움직임을 제어하며, 스택 된 팔레트는 단단하고 붕괴되지 않으므로 제품의 운송 및 보관 관리에 도움이됩니다. 고도로 자동화 : 수직 팔레타이저는 정확한 움직임, 높은 작동 정확도, 대형 작업 범위 및 독립 제어 시스템을 통해 전체 서보 드라이브를 채택하여 작동 정확도를 보장합니다. 높은 비용 성능 : 수직 팔레타이저는 저렴하고 팔레팅 로봇의 3 분의 1에 불과하며 포괄적 인 응용 비용, 유지 보수 비용이 낮고 실패율이 낮습니다. 간단한 구조 : 수직 팔레타이저는 간단한 구조를 가지고 있으며 유지하기가 쉽습니다. 베어링을 정기적으로 윤활하면 유지 보수 비용이 줄어 듭니다. 긴 서비스 수명: 기계적 구조로 인해 수직 팔레타이저는 서비스 수명이 길며 기본적으로 복잡한 유지 보수가 필요하지 않습니다. |

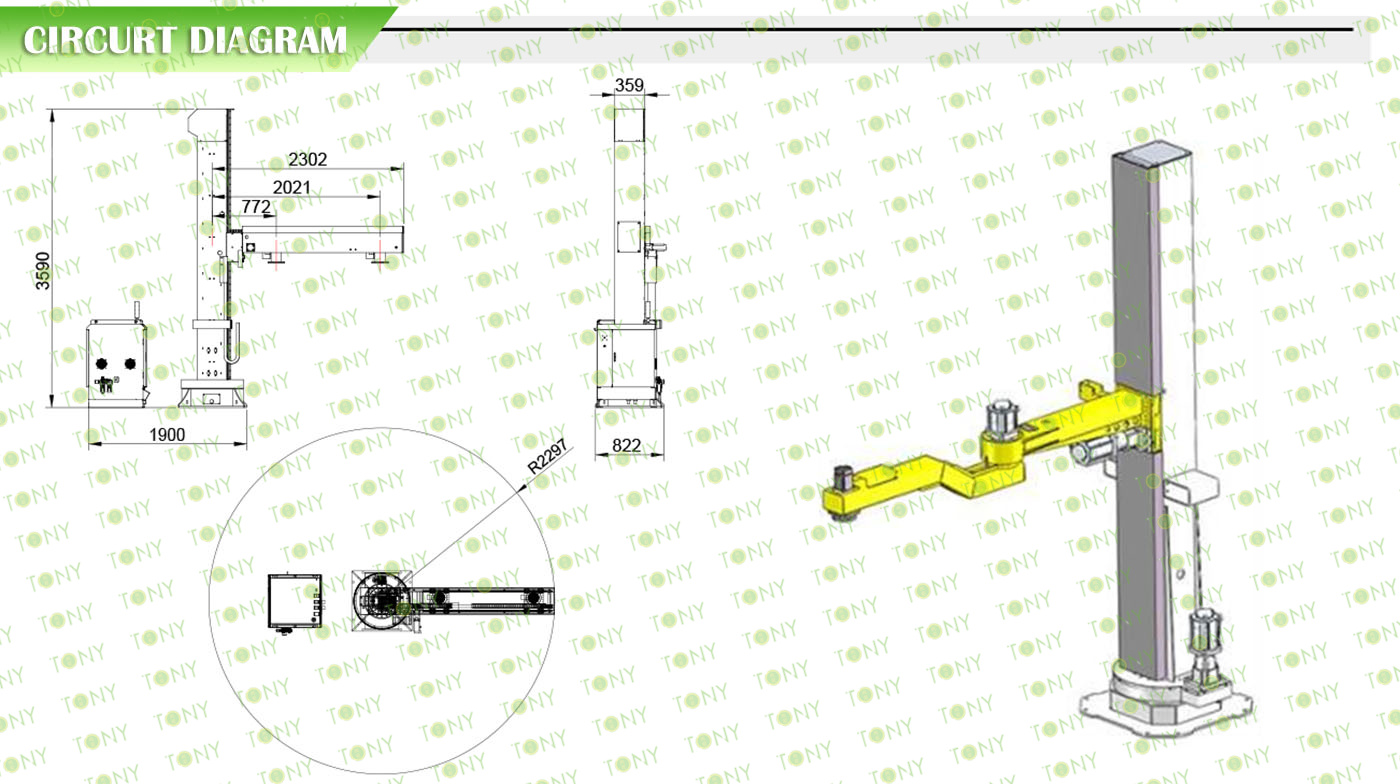
| 움직임 범위 | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900mm | |
| J4 | ±240° | |
| 최대 부하 | 120kg | |
| 작업 능력 | 350-400패키지 | |
| 전원 공급 장치 | 380V 50Hz3 단계 4 와이어 | |
| 운영력 | 5.7kW | |
| 주 단위 크기 | l3090mm×W1000mm×H3360mm(새로운 모델) | |
| 스태킹 높이 | 1900mm | |
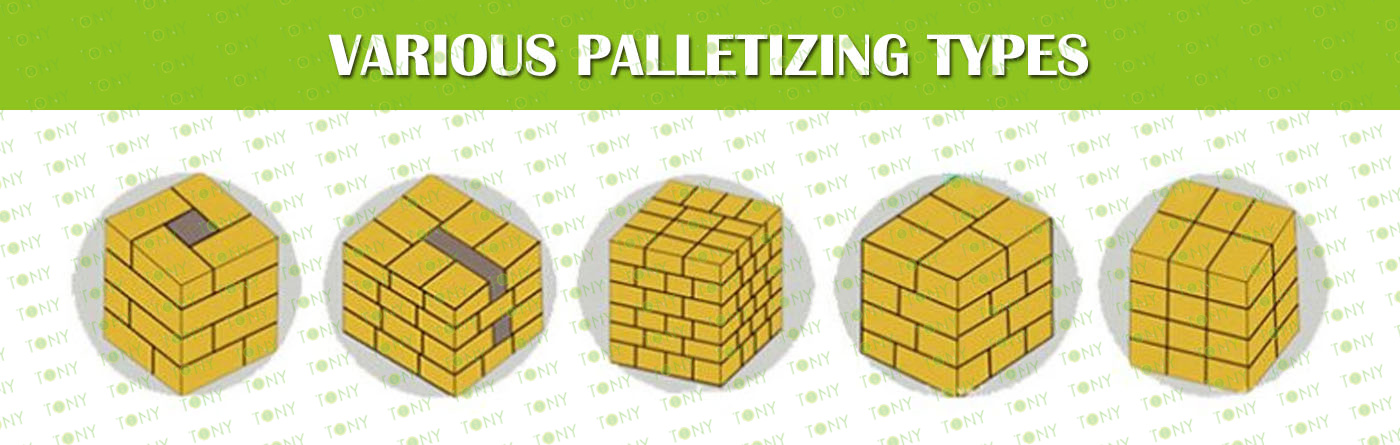
| 쌓는 모양 | 5 개의 꽃, 6 성형 등 | |
| 공기 공급 압력 | 0.6-0.8ma | |
| 장비 무게 | 1400kg | |
| 팔레타이저 이름과 모델 | GJ-LZ400 |
| 운동의 자유 (축) | 4 |
| 최대 부하 용량 (kg) | 80 |
| 포지셔닝 정확도 반복 (MM) | ±1mm |
| 드라이브 모드 | 서보 드라이브 |
| 담체 | 집게 |
| 팔레 타이 징 메모리 | 지능형 기억 |
| 최대 적용 범위 (MM) | 2350 |
| 최대 적용 범위 (MM) | 925 |

|
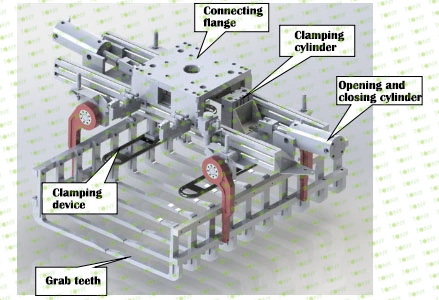
1. 그립퍼유형 및 장치 : 발톱 - 손가락 타입 특수 백 그립퍼를 채택합니다. 공압 클램핑 장치와 공압 개방/닫기 장치가 장착되어 있습니다. 2. 프레임 구조: 전체 프레임은 알루미늄 프로파일로 만들어집니다. 그것은 견고한 구조를 가지고있어 안정적이고 안정적인 파악 공정을 보장합니다. 3. 조절 가능한 횡령 치아 : 그리퍼의 양쪽에있는 톱니를 수동으로 조정할 수 있습니다. 이 조정은 다른 사양 백의 요구 사항을 충족 할 수 있습니다. 4. 치아 재료와 간격을 잡습니다 : 횡령 치아는 알루미늄 합금으로 만들어집니다. 횡단 치아 간격은 코드 머신 롤러의 중심 거리와 일치합니다. |
|
|
|
|

| 그리퍼 구조 | 발톱 핑거 타입 특수 백 그립퍼 |
| 로봇과의 연결 방법 | 플랜지 연결 |
| 클램핑 장치 스트로크 (MM) | 150 |
| 오프닝/닫기 장치 스트로크 (MM) | 200 |
| 드라이브 방법 | 실린더 드라이브 |
| 공압 구성 요소 브랜드 구성 | 일본 SMC |
| 적용 가능한 제품 사양 | 고객이 제공하는 제품 사양을 기반으로합니다 |

|
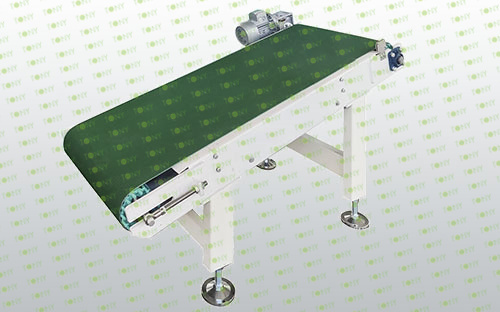
등반 벨트 컨베이어는 재료를 낮은 곳에서 필요한 높이까지 운반합니다. 주로 프레임, 컨베이어 벨트, 롤러, 롤러, 장력 장치, 변속기 장치 등으로 구성됩니다. 프레임은 스프레이 코팅 표면, 고체 및 신뢰할 수있는 구조 및 3.5-4mm의 플레이트 두께가있는 고품질 탄소강으로 만들어집니다. 가이드 플레이트 양쪽의 가이드 플레이트의 위치를 조정할 수 있습니다. 고품질 PVC 벨트는 원활한 운송에 사용됩니다. 잘 알려진 국내 브랜드 모터에 의해 구동됩니다. 약 L1600 × W650 (유효 폭) × H370 ~ H900, 높이 조절 가능 ± 50mm; 광전 감지 포지셔닝 장치는 컨베이어의 끝에 설정됩니다. 광전 감지 스위치 : Omron 또는 동등한 브랜드 모터는 보호 덮개로 덮어야하며, 재료가 모터를 부식하는 것을 방지하기 위해 부식 방지가 필요합니다. |
||||||||||||||||||||||
| 관련 구성 | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
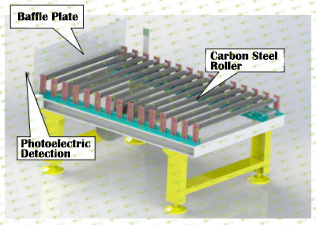
코드 웨이팅 롤러 컨베이어는 잡기 전에 재료 백을 찾아 감지하는 데 사용되며, 포지션 신호를 로봇에 제공하여 잡을 수 있습니다. 주요 구조와 매개 변수는 다음과 같습니다. 프레임은 탄소강 프로파일로 만들어졌으며 구조는 단단하고 신뢰할 수 있으며 플레이트 두께는 3-4mm입니다. 롤러는 스프로킷 카본 스틸 롤러로 만들어졌습니다. 그것은 잘 알려진 국내 브랜드 모터에 의해 주도됩니다. 운송 높이는 900 ± 50mm 조정 가능입니다. 컨베이어의 전체 치수는 대략 L1040 × W650mm (유효 너비)입니다. 광전 감지 내 위치 장치는 컨베이어의 끝에 설정됩니다. 광전 감지 스위치 : Omron 또는 동등한 브랜드 모터는 보호 덮개로 덮어야하며, 재료가 모터를 부식하는 것을 방지하기 위해 부식 방지가 필요합니다. |
||||||||||||||||
| 관련 구성 | ||||||||||||||||
 |
|
|||||||||||||||

|
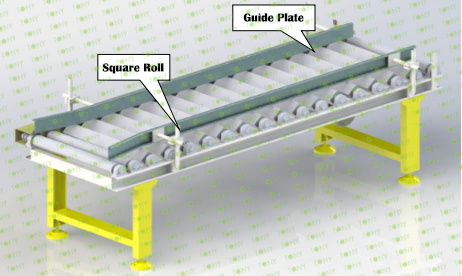
사각형 롤러 모양의 컨베이어는 제곱 롤러에 의해 생성 된 진동을 사용하여 가방에 재료를 골고루 분포하고 가방을 전체적으로 평평하게 만듭니다. 주요 구조와 매개 변수는 다음과 같습니다. 프레임은 강철로 만들어졌으며 구조는 단단하고 신뢰할 수 있으며 플레이트 두께는 3-4mm입니다. 양쪽의 가이드 플레이트는 탄소강으로 만들어졌으며 가이드 플레이트의 위치는 조절 가능합니다. 컨베이어 롤러는 매끄러운 표면이있는 탄소강 롤러로 만들어집니다. 그것은 잘 알려진 국내 브랜드 모터에 의해 주도됩니다. 운송 높이는 900 ± 50mm 조정 가능입니다. 모양 컨베이어의 전체 치수는 대략 L2000 × W650mm (롤러의 유효 폭)입니다. 광전 감지 포지셔닝 장치는 컨베이어의 끝에 설정됩니다. 광전 감지 스위치 : Omron 또는 동등한 브랜드 모터는 보호 덮개로 덮어야하며, 이는 재료가 모터를 부식시키는 것을 방지하기 위해 부식 방지가 필요합니다. 정사각형 롤러 형성 기계의 모양 |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. 전원 공급 장치 (단일 생산 라인) 전원 공급 장치 전압 : AC380V ± 10% 50Hz 제어 전원 공급 장치 : DC24V 전력 소비 : ~ 8kW |
2. 항공 공급 (단일 생산 라인) 표준 기기 공기 압력 : 0.4 ~ 0.6mpa 공기 소비 : 3 3 5 nm3/h |
|
3. 환경 온도 : -10 ~+50 ℃ 습도 : ≤90% (응축 없음) |
4. 바닥 두께 : ≥18cm 표준 콘크리트 |


|
24 시간 온라인 서비스. -Inquiry는 2 시간 이내에 답변됩니다. -주문 배달에서 제공되는 모든 방향 추적 서비스. -운영, 디버깅 및 일일 유지 보수를위한 무료 교육. -전문 가이드 설치를 제공 할 수 있습니다. -한 해 보증 및 만능 애프터 판매 서비스. -고객은 컨트로 디자인 및 흐름도를 사용할 수 있습니다. -독립적 인 R & D 팀 및 엄격하고 과학 관리 시스템 |
 |





2025 Tony Machinery- 모든 권리 보유. 지도