
 |
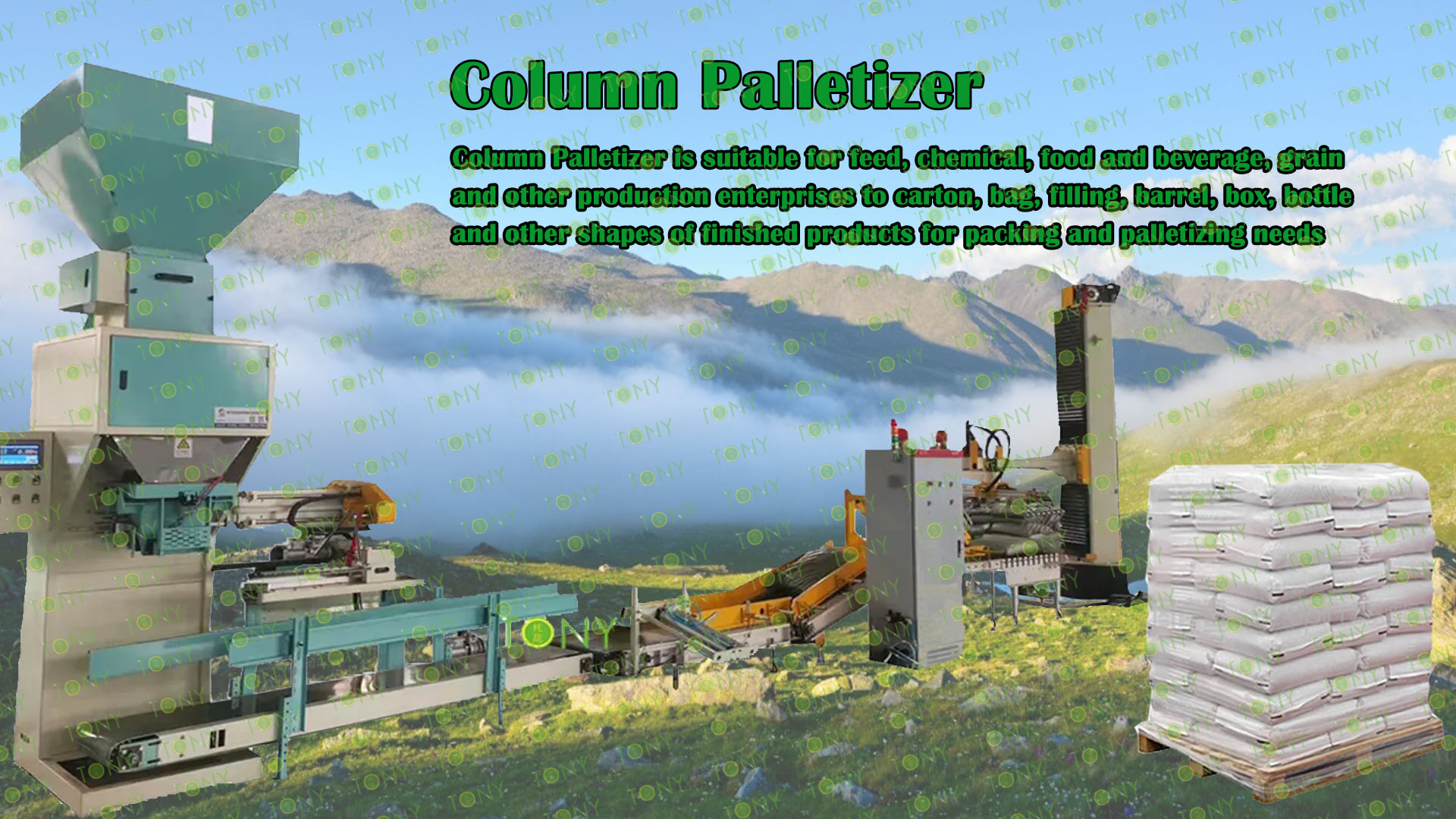
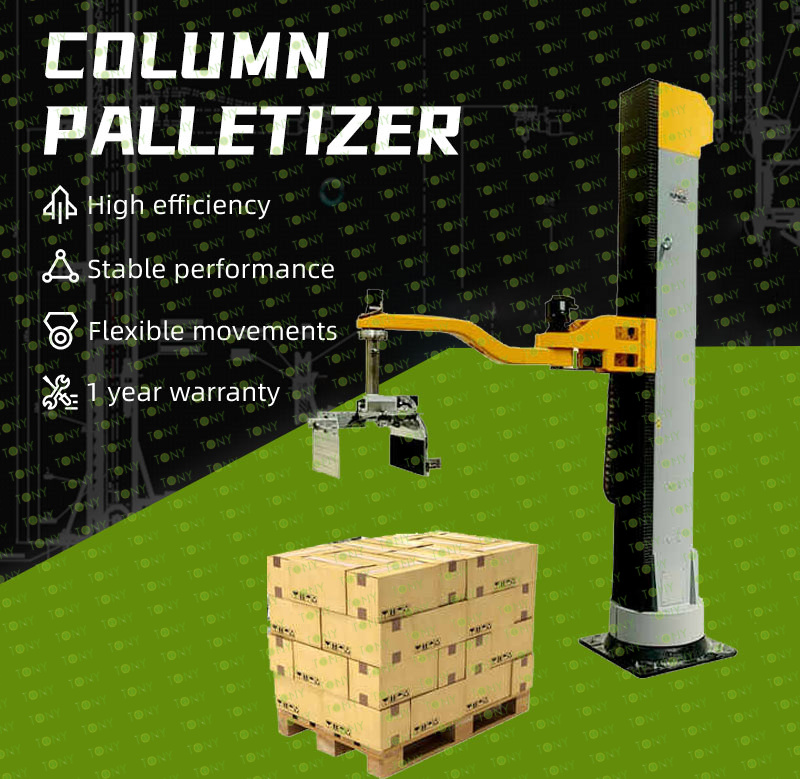
Roboții de coloane din seria Tony au actuatoare liniare unice, proiecte de brațe de economisire a energiei și ecologice, interfețe simple de funcționare și principale personalizate. Acestea pot oferi soluții robot profesionale personalizate pentru diferite linii și materiale de producție. Precizia și viteza lor excelentă, performanța eficientă și stabilă permit unui robot să completeze cerințele de paletizare ale mai multor linii de producție în același timp. Robotul are o capacitate de încărcare de 50 kg-80 kg și este potrivit pentru furaje, chimice, cereale și ulei, alimente, materiale de construcție, substanțe chimice zilnice, alcool, băuturi, medicamente, aparate de acasă, electronice 3C și alte industrii. |

|
Paletizerul de coloană realizează interpolarea liniară punct - până la punct prin sistemul de control al robotului, ceea ce face ca mișcarea să fie netedă și fluentă. Principiul său de lucru este următorul: 1. Transport și poziționare a materiei: Materialele ambalate sunt transportate în zona de paletizare desemnată prin transportor. Aceste materiale sunt apoi poziționate. 2. Poziționarea dispozitivului: robotul mută dispozitivul în partea de sus a poziționării materialului prin coordonarea fiecărei axe. 3. Cultivarea materiei: Când este emis semnalul de poziționare a materialului, aparatul se deplasează în jos prin controlul servo -motorului. Apoi ridică materialul. 4. Transport și plasare a materialelor: După ridicarea materialului, aparatul îl transportă în partea de sus a poziției de paletizare. Acest lucru permite materialului să ajungă la punctul de plasare. Ulterior, materialul este stivuit în poziția desemnată. 5. Funcționare efectuată: Repetați acțiunile de mai sus până la finalizarea întregului palet. |
 |

 |
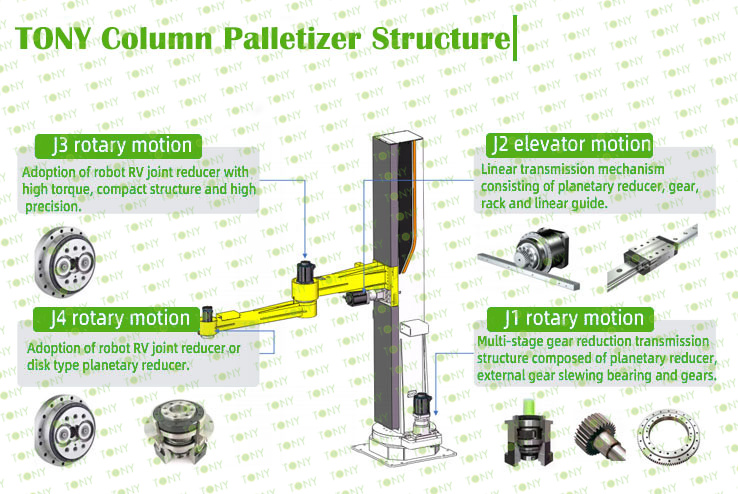
1.. Actuator liniar unic: Mecanismul inteligent de patru axe cu patru axe face ca programul de mișcare a robotului să fie mai simplu și controlul mai precis. 2.. Producția de înaltă rezistență și rezonabilă nu numai că face mișcarea brațului mai flexibilă, dar reduce și pierderea de energie. 3. Operația de predare simplă și interfața de operare grafică prietenoasă:Există puține poziții didactice, iar interfața de operare este simplă, ceea ce face ca depanarea la fața locului să fie mai ușoară și să îmbunătățească foarte mult eficiența la fața locului. 4. Monitorizare în timp real la fața locului: Software-ul de simulare a mișcării la fața locului de înaltă precizie poate înțelege de la distanță dacă programul la fața locului funcționează normal și monitorizează automat interferența pentru a evita coliziunile de interferență. 5. Simulare pre-layout la fața locului: Folosind un software puternic de simulare/programare 3D, puteți completa cu ușurință programarea robotului, aspectul, monitorizarea interferențelor, simularea mișcării la fața locului și alte serii de lucrări la birou, care devine simplă și eficientă, reducând astfel foarte mult timpul de depanare la fața locului și îmbunătățind eficiența generală a producției. |


|
1 |
Capacitate de paletizare |
350-400 de ori/oră |
|
2 |
Paletizarea straturilor |
5-10 straturi |
|
3 |
Înălțimea maximă de stivuire |
1,9 metri |
|
4 |
Stocarea programului nelimitat |
Nelimitat |
|
5 |
Paletizarea timpului de lucru |
24 de ore funcționare continuă |
|
6 |
Mediu paletizant |
Faceți cunoștință cu mediul de producție al cumpărătorului |

 |
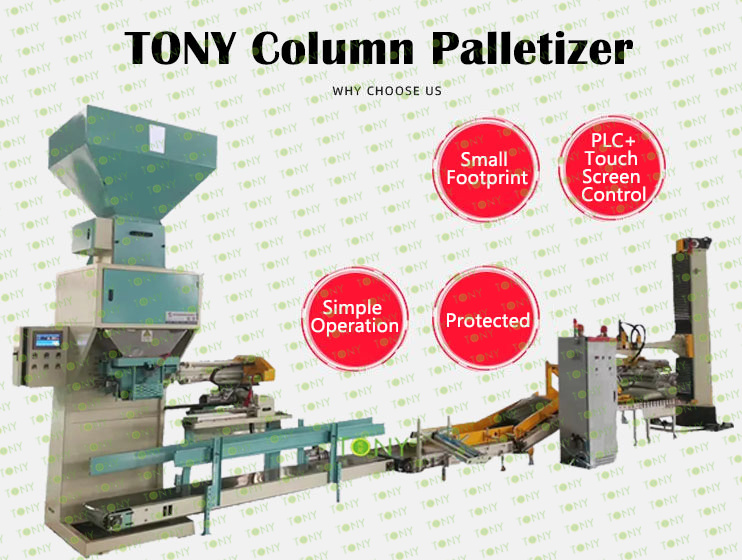
Abilitate puternică de lucru continuă: paletizatorul vertical poate funcționa continuu timp de 8 ore și poate înlocui 3-4 lucrători, economisind astfel costurile forței de muncă. Aplicabilitate puternică: Paletizatorul vertical este potrivit pentru o varietate de scenarii și poate fi utilizat pentru paletizarea operațiunilor pe mai multe linii de producție. Are o structură mică și ocupă o suprafață mică. Precizie ridicată a funcționării: Paletizatorul vertical controlează mișcarea Gripper printr -un program, iar paleta stivuită este fermă și nu se va prăbuși, ceea ce este propice pentru gestionarea transportului și depozitării produsului. Grad ridicat de automatizare: Paletizatorul vertical adoptă un drive servo, cu o mișcare precisă, o precizie ridicată a funcționării, un interval mare de lucru și un sistem de control independent pentru a asigura precizia funcționării. Performanță cu costuri ridicate: Paletizatorul vertical este accesibil, doar o treime din robotul de paletizare și are costuri de aplicare completă scăzută, costuri reduse de întreținere și rată de eșec scăzută. Structura simplă: Paletizatorul vertical are o structură simplă și este ușor de întreținut. Trebuie doar să unge în mod regulat rulmenții, ceea ce reduce costurile de întreținere. Durata de viață lungă: Datorită structurii sale mecanice, paletizatorul vertical are o durată de viață lungă și, practic, nu necesită o întreținere complicată. |

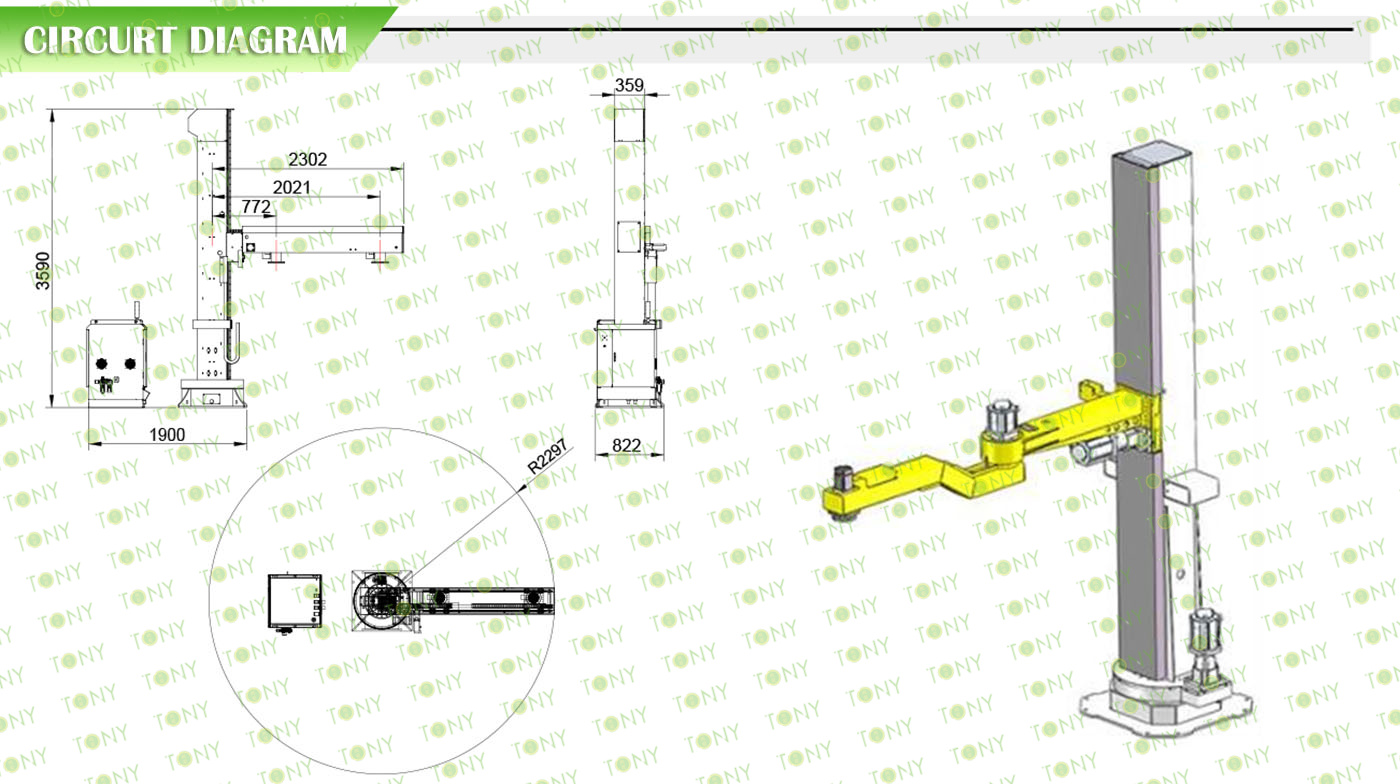
| Gama de mișcare | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900mm | |
| J4 | ±240° | |
| Sarcină maximă | 120 kg | |
| Capacitate de lucru | 350-400pachete | |
| Alimentare electrică | 380V 50Hztrifazic cu patru fire | |
| Putere de funcționare | 5.7kW | |
| Dimensiunea unității principale | L3090mm×W1000mm×H3360mm(model nou) | |
| Înălțimea stivuirii | 1900mm | |
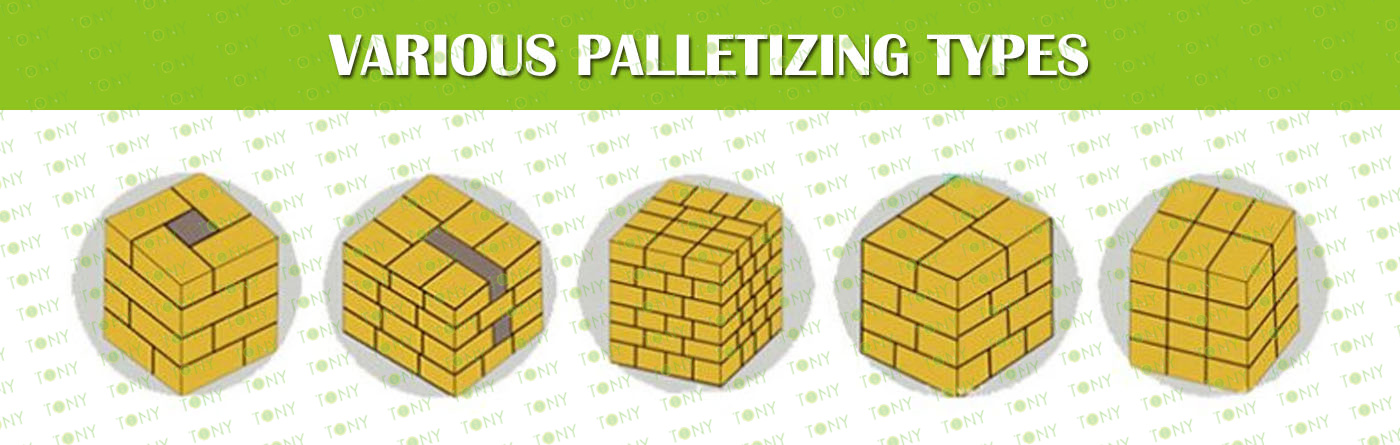
| Forma stivuirii | Cu cinci flori, cu șase flori etc. | |
| Presiunea de alimentare cu aer | 0,6-0,8mA | |
| Greutatea echipamentului | 1400 kg | |
| Numele și modelul paletizatorului | GJ-LZ400 |
| Libertatea mișcării (axa) | 4 |
| Capacitate maximă de încărcare (kg) | 80 |
| Precizia de poziționare repetată (MM) | ±1mm |
| Mod de conducere | Servo Drive |
| Purtător | Clemă |
| Memorie paletizantă | Memorie inteligentă |
| Acoperire maximă (mm) | 2350 |
| Acoperire maximă (mm) | 925 |

|
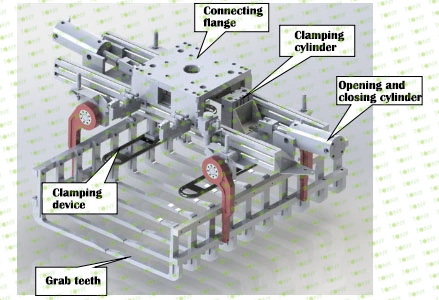
1. GripperTip și dispozitive: Adoptează o gheare de gheață - Tipul Special Bag. Este echipat cu un dispozitiv de prindere pneumatică și un dispozitiv pneumatic de deschidere/închidere. 2. Structura cadrului: Întregul cadru este realizat din profiluri de aluminiu. Are o structură solidă, asigurând un proces stabil și de încredere. 3. Dinti de prindere reglabili: Dintii de prindere de pe ambele părți ale Gripper -ului pot fi reglate manual. Această ajustare poate îndeplini cerințele pungilor de specificații diferite. 4. Prindeți materialul dinților și distanțarea: Dintii de prindere sunt confecționate din aliaj de aluminiu. Distanța dinți de prindere este în concordanță cu distanța centrală a rolei de mașină de cod. |
|
|
|
|

| Structura Gripper | Claw Finger Special Bag Bag Gripper |
| Metoda de conectare cu robot | Conexiune cu flanșă |
| Claming Device Stroke (MM) | 150 |
| Deschidere/închidere a dispozitivului de dispozitiv (MM) | 200 |
| Metoda Drive | Unitatea de cilindru |
| Configurația mărcii componente pneumatice | Japonia SMC |
| Specificațiile aplicabile ale produsului | Pe baza specificațiilor produsului furnizate de client |

|
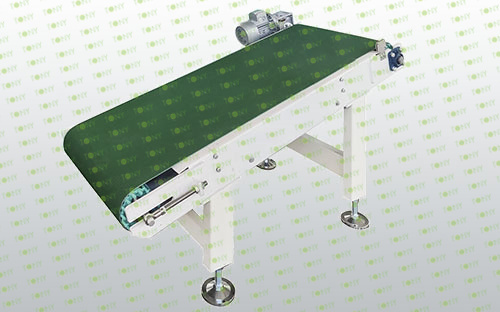
Transportorul de curea de alpinism transportă materialele de la un loc scăzut până la înălțimea necesară. Este compus în principal dintr -un cadru, bandă transportoare, role, role, dispozitive de tensiune, dispozitive de transmisie etc. Cadrul este confecționat din oțel de carbon de înaltă calitate, cu o suprafață acoperită cu pulverizare, o structură solidă și fiabilă și o grosime a plăcii de 3,5-4 mm; Plăcile de ghidare pe ambele părți, poziția plăcilor de ghidare poate fi reglată; Centurile de PVC de înaltă calitate sunt utilizate pentru un transport lină; Condus de un cunoscut motor al mărcii interne; Aproximativ L1600 × W650 (lățime efectivă) × H370 ~ H900, reglabil în înălțime ± 50mm; Un dispozitiv de poziționare a detectării fotoelectrice este setat la capătul transportorului; Comutator de detectare fotoelectrică: Omron sau marcă echivalentă Motorul trebuie să fie acoperit cu un capac de protecție, care trebuie să fie rezistent la coroziune pentru a împiedica materialul să corodeze motorul |
||||||||||||||||||||||
| Configurație aferentă | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
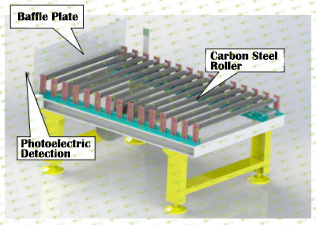
Transportorul cu role care așteaptă cod este utilizat pentru a localiza și detecta punga de material înainte de a se apuca și pentru a oferi semnalul de poziție robotului pentru apucare. Structura principală și parametrii sunt următorii: Cadrul este confecționat din profiluri de oțel de carbon, structura este fermă și fiabilă, iar grosimea plăcii este de 3-4 mm; Ruloul este confecționat din role de oțel de carbon cu pinion; Este condus de un cunoscut motor al mărcii interne; Înălțimea de transport este reglabilă de 900 ± 50mm; Dimensiunile generale ale transportorului sunt aproximativ L1040 × W650mm (lățime efectivă); Un dispozitiv fotoelectric de detectare în poziție este setat la sfârșitul transportorului; Comutator de detectare fotoelectrică: Omron sau marcă echivalentă Motorul trebuie să fie acoperit cu un capac de protecție, care trebuie să fie rezistent la coroziune pentru a împiedica materialul să corodeze motorul |
||||||||||||||||
| Configurație aferentă | ||||||||||||||||
 |
|
|||||||||||||||

|
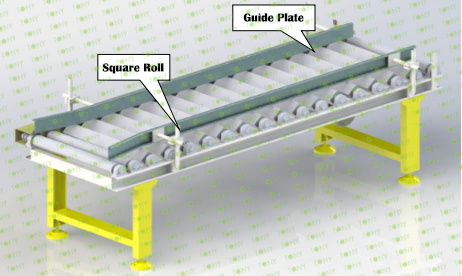
Transportorul de modelare a rolelor pătrate folosește vibrația generată de role pătrată pentru a distribui uniform materialul în pungă și a face geanta în ansamblu în ansamblu. Structura principală și parametrii sunt următorii: Cadrul este confecționat din oțel, structura este fermă și fiabilă, iar grosimea plăcii este de 3-4 mm; Plăcile de ghidare de pe ambele părți sunt confecționate din oțel carbon, iar poziția plăcilor de ghidare este reglabilă; Rolele transportoare sunt confecționate din role de oțel de carbon cu o suprafață netedă; Este condus de un cunoscut motor al mărcii interne; Înălțimea de transport este reglabilă de 900 ± 50mm; Dimensiunile generale ale transportorului de modelare sunt aproximativ L2000 × W650mm (lățimea efectivă a rolei); Un dispozitiv de poziționare a detectării fotoelectrice este setat la capătul transportorului; Comutator de detectare fotoelectrică: Omron sau marcă echivalentă Motorul trebuie să fie acoperit cu un capac de protecție, care trebuie să fie rezistent la coroziune pentru a împiedica materialul să corodeze motorul. Aspectul mașinii de modelare a rolelor pătrate |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. Sursa de alimentare (o singură linie de producție) Tensiune de alimentare: AC380V ± 10% 50Hz Sursa de alimentare de control: DC24V Consum de energie: ~ 8KW |
2. Suppunere de aer (linie de producție unică) Air instrument standard Presiune: 0,4 ~ 0,6MPa Consum de aer: 3 ~ 5 nm3/h |
|
3. Mediu Temperatură: -10 ~+50 ℃ Umiditate: ≤90% (fără condensare) |
4. Etaj Grosime: ≥18 cm beton standard |


|
24 de ore de serviciu online. -INQUIRY va fi răspuns în 2 ore. -Alt-the-way Service de urmărire oferit de la plasarea comenzii până la livrare. -Ainrentare gratuită pentru operare, depanare și întreținere zilnică. -Am să oferim instalarea profesională a ghidului. -Nu garanție de an și serviciu post-vânzare în întregime. -A Graficul de proiectare și fluxuri personalizate sunt disponibile pentru clienții noștri. -Echipa de cercetare și dezvoltare independentă și de sistem de management strict și științific |
 |





2025 Tony Machinery - Toate drepturile rezervate. Hartă