
 |
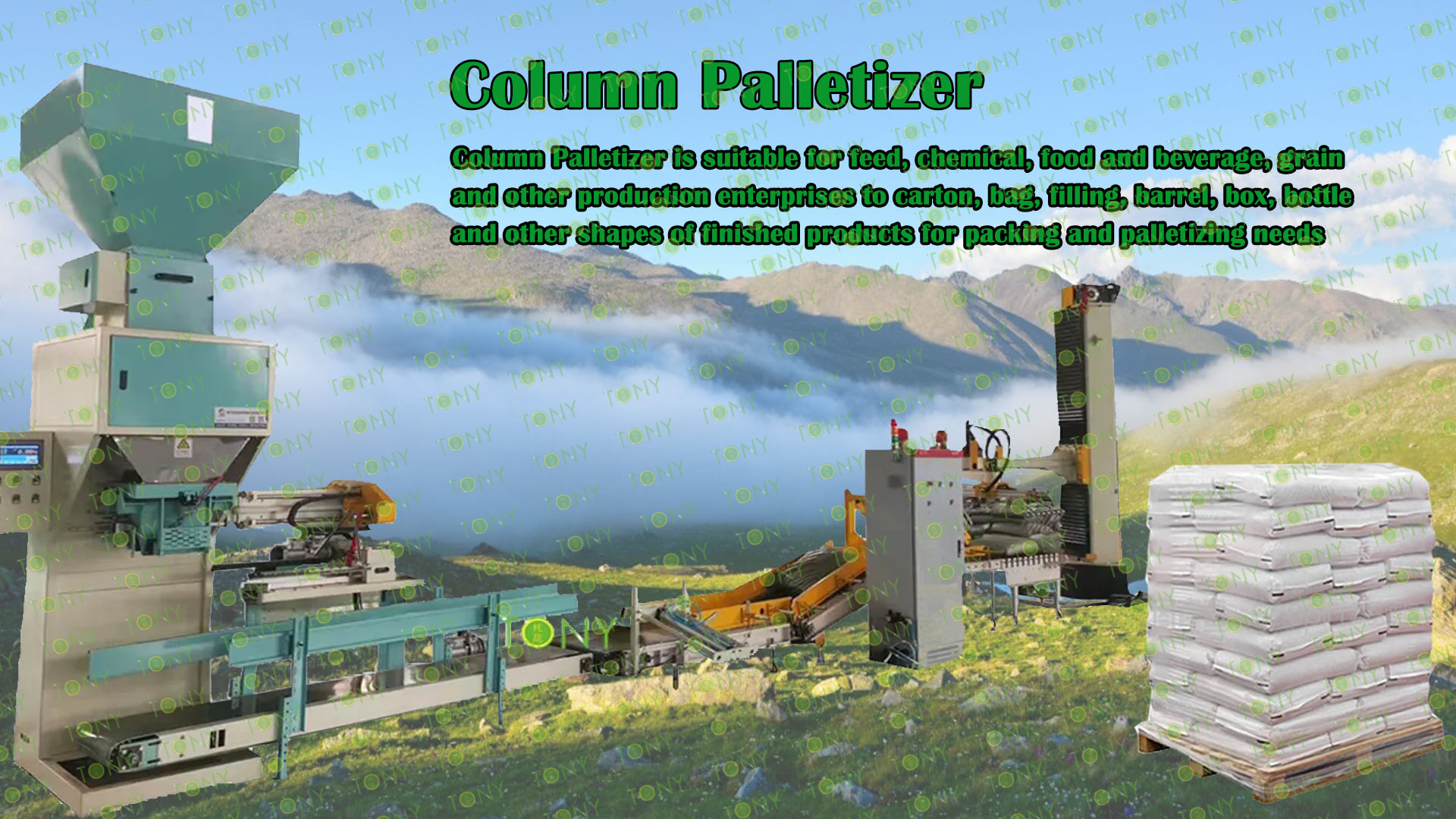
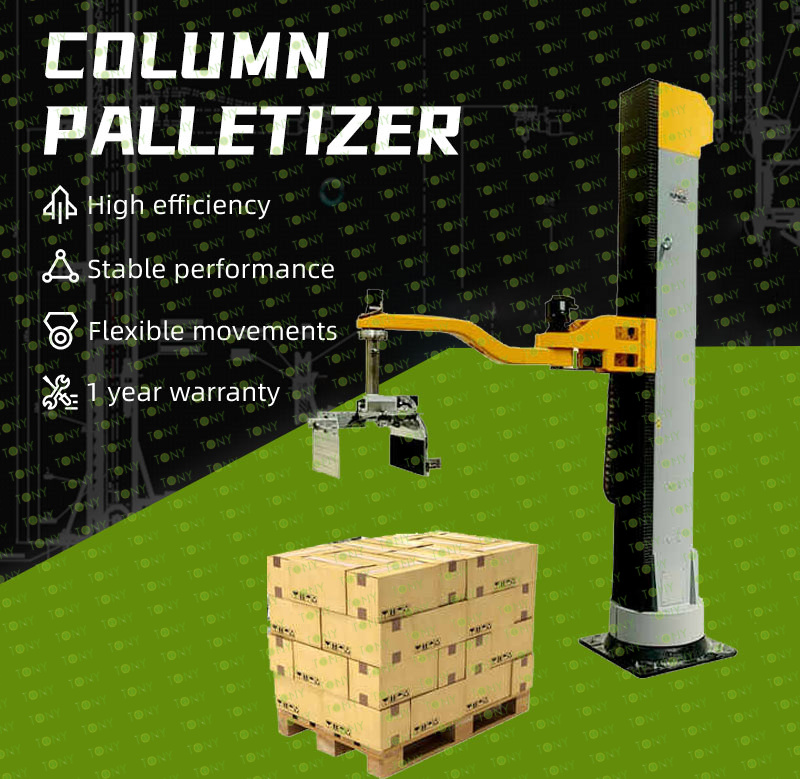
Tonyシリーズのコラムロボットには、ユニークな線形アクチュエーター、省エネと環境に優しいアームデザイン、シンプルな操作インターフェイス、カスタマイズされたグリッパーがあります。 さまざまな生産ラインや材料向けにカスタマイズされたプロフェッショナルロボットソリューションを提供できます。それらの優れた精度と速度、効率的で安定したパフォーマンスにより、1つのロボットが複数の生産ラインのパレタイゼーション要件を同時に完了することができます。 ロボットの負荷容量は50kg-80kgで、飼料、化学物質、穀物、石油、食品、建築材料、毎日の化学物質、アルコール、飲み物、薬、家電製品、3C電子機器、その他の産業に適しています。 |

|
カラムパレタイザーは、ロボット制御システムを介したポイント - トゥポイント線形補間を実現し、動きを滑らかで流fluentにします。その作業原則は次のとおりです。 1.材料の輸送と位置決め:パッケージ化された材料は、コンベアを介して指定されたパレタイジングエリアに輸送されます。これらの材料は配置されます。 2。フィクスチャポジショニング:ロボットは、各軸の調整を通じて、材料の位置決めの上部にフィクスチャを移動します。 3.材料ピッキング:材料の位置決め信号が発行されると、備品はサーボ - モーター制御を介して下方に移動します。その後、素材を拾います。 4。材料の輸送と配置:材料を拾った後、フィクスチャはそれをパレタイジング位置の最上部に輸送します。これにより、材料が配置点に到達できます。その後、材料は指定された位置に積み重ねられます。 5.繰り返し操作:パレット全体が完了するまで、上記のアクションを繰り返します。 |
 |

 |
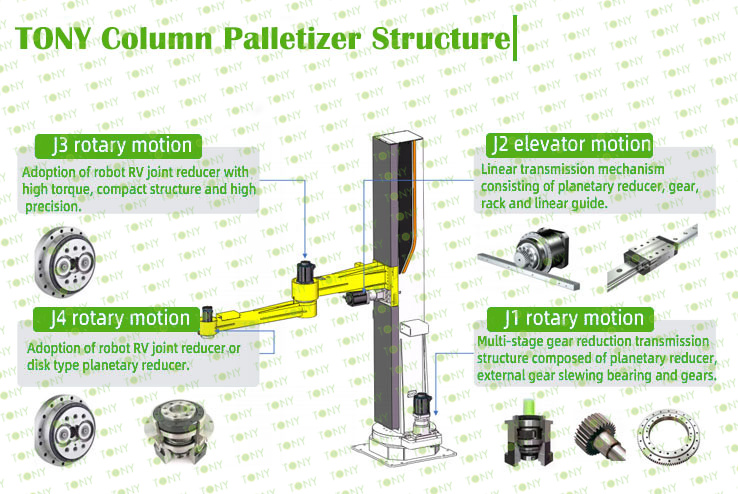
1。ユニークな線形アクチュエーター: 巧妙な4軸ジョイントメカニズムにより、ロボットモーションプログラムがよりシンプルになり、コントロールがより正確になります。 2。省エネと環境に優しいロボットアームのデザイン: 高強度で合理的な生産により、アームの動きがより柔軟になるだけでなく、エネルギーの損失を減らします。 3.簡単な教育操作とフレンドリーなグラフィカル操作インターフェイス:教育位置はほとんどなく、操作インターフェイスはシンプルで、オンサイトのデバッグが容易になり、オンサイトの効率が大幅に向上します。 4.リアルタイムのオンサイト監視: 高精度のオンサイトモーションシミュレーションソフトウェアは、オンサイトプログラムが正常に動作しているかどうかをリモートで理解し、干渉の衝突を避けるために干渉を自動的に監視できます。 5。オンサイトシミュレーション前: 強力な3Dシミュレーション/プログラミングソフトウェアを使用して、ロボットプログラミング、レイアウト、干渉監視、オンサイトモーションシミュレーション、およびオフィスでのその他の一連の作業を簡単に完了することができます。 |


|
1 |
パレタイズ容量 |
350〜400回/時間 |
|
2 |
パレタイズ層 |
5-10レイヤー |
|
3 |
最大スタッキング高さ |
1.9メートル |
|
4 |
プログラムストレージ無制限 |
無制限 |
|
5 |
パレタイジング作業時間 |
24時間連続操作 |
|
6 |
パレタイズ環境 |
買い手の生産環境に会います |

 |
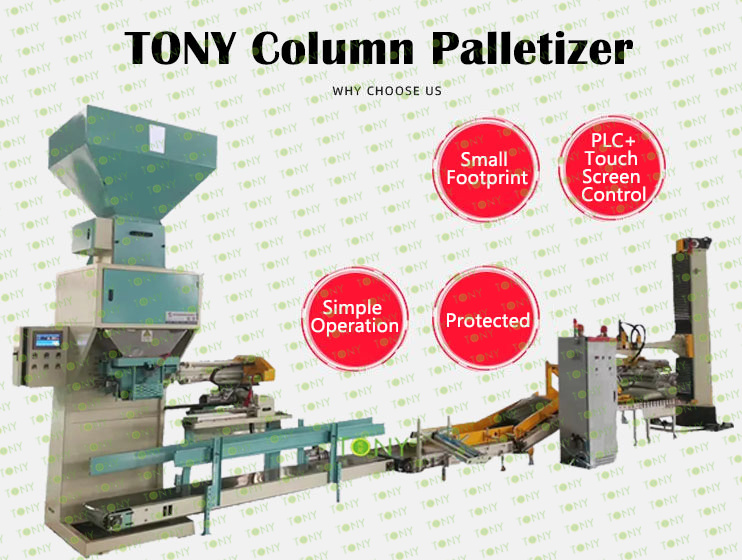
強力な継続的な作業能力:垂直パレタイザーは8時間継続的に動作し、3〜4人の労働者を置き換えることができ、したがって人件費を節約できます。 強力な適用性: 垂直パレタイザーは、さまざまなシナリオに適しており、複数の生産ラインでの操作のパレタイズに使用できます。それは小さな構造を持ち、小さな領域を占有します。 高い動作精度: 垂直パレタイザーは、プログラムを介してグリッパーの動きを制御し、積み重ねられたパレットは硬く、崩壊しません。これは製品の輸送と貯蔵管理を助長します。 高度の自動化: 垂直パレタイザーは、完全なサーボドライブを採用しており、正確な動き、高い動作精度、大きな作業範囲、および操作の精度を確保するための独立した制御システムを備えています。 高コストのパフォーマンス: 垂直パレタイザーは手頃な価格で、パレット化ロボットの3分の1しかなく、包括的なアプリケーションコスト、メンテナンスコストが低く、失敗率が低いです。 シンプルな構造: 垂直パレタイザーはシンプルな構造を持ち、メンテナンスが簡単です。ベアリングを定期的に潤滑するだけで、メンテナンスコストが削減されます。 長いサービスライフ:その機械的構造により、垂直パレタイザーは長いサービス寿命を持ち、基本的に複雑なメンテナンスを必要としません。 |

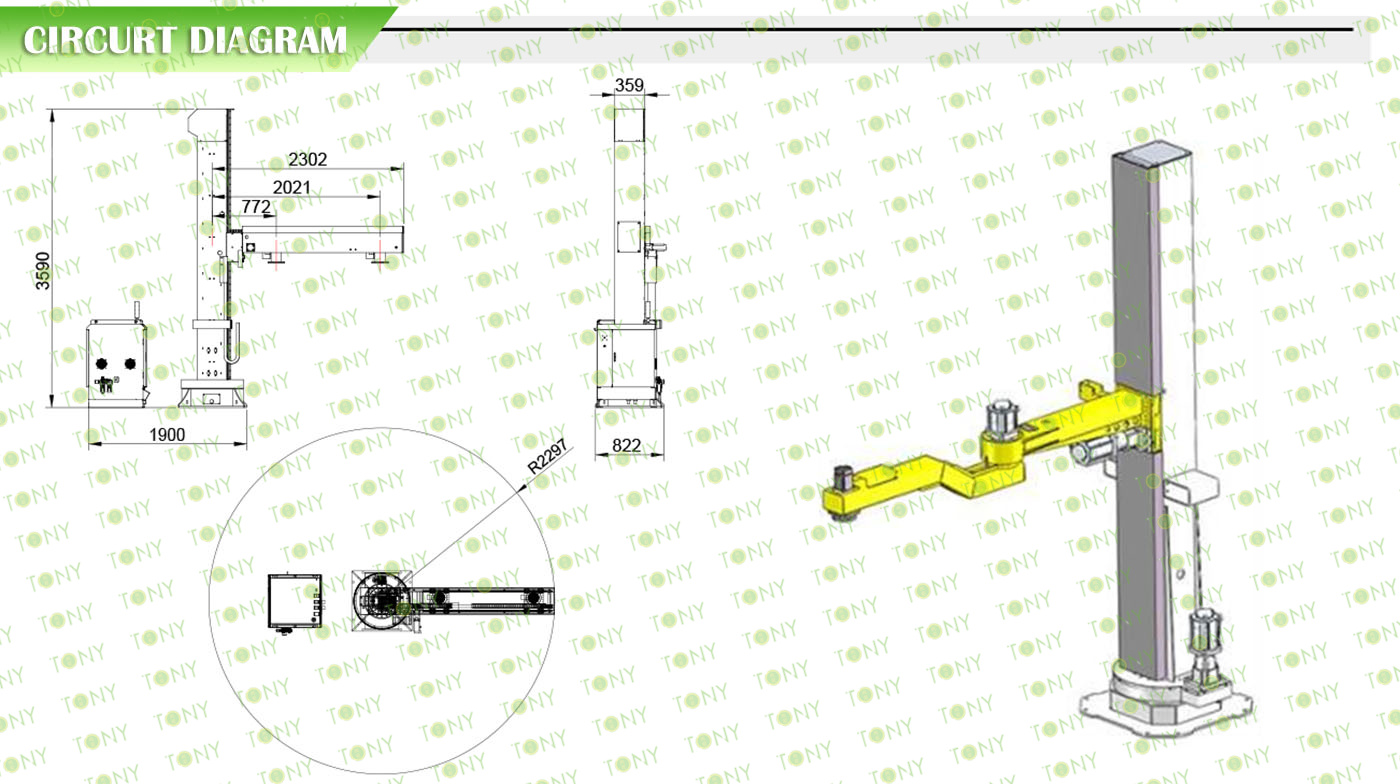
| 可動域 | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900mm | |
| J4 | ±240° | |
| 最大負荷 | 120kg | |
| 作業能力 | 350-400パッケージ | |
| 電源 | 380V 50Hz三相四wire | |
| 動作電力 | 5.7kw | |
| メインユニットサイズ | L3090mm×W1000mm×H3360mm(新しいモデル) | |
| スタッキングの高さ | 1900mm | |
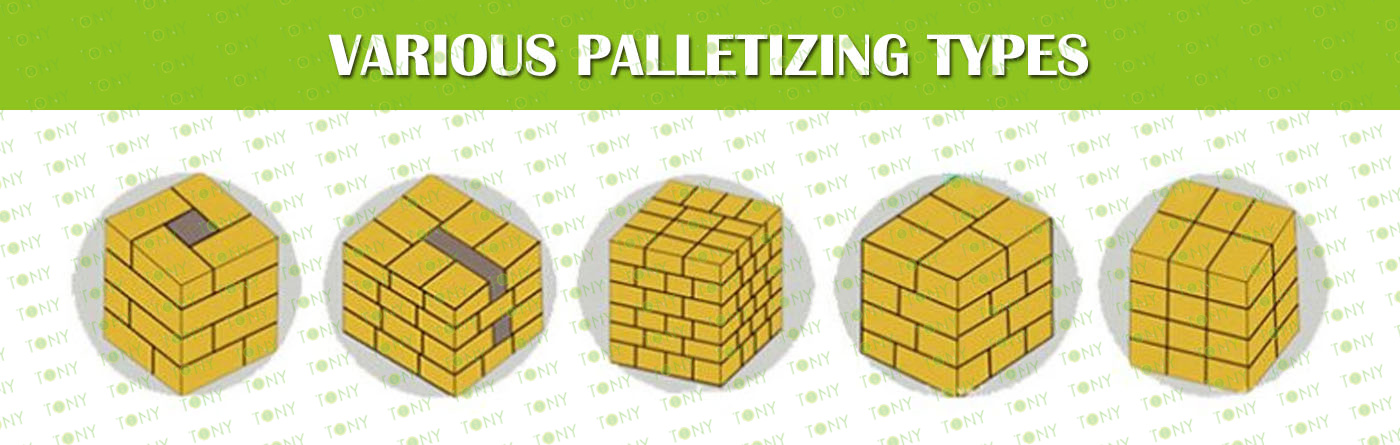
| スタッキング形状 | 5風の、6風など。 | |
| 空気供給圧力 | 0.6-0.8mA | |
| 機器の重量 | 1400kg | |
| パレタイザー名とモデル | GJ-LZ400 |
| 運動の自由(軸) | 4 |
| 最大負荷容量(kg) | 80 |
| ポジショニング精度を繰り返す(mm) | ±1mm |
| ドライブモード | サーボドライブ |
| キャリア | クランプ |
| パレタイズメモリ | インテリジェントなメモリ |
| 最大カバレッジ(mm) | 2350 |
| 最大カバレッジ(mm) | 925 |

|
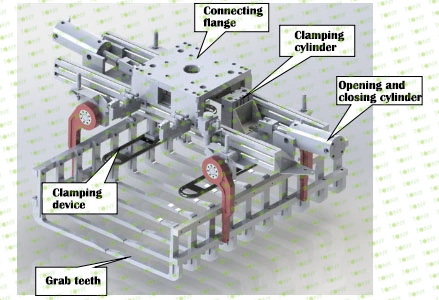
1. グリッパータイプとデバイス: 爪を採用します - 指型スペシャルバッググリッパー。空気圧クランプデバイスと空気圧開閉装置が装備されています。 2。フレーム構造: フレーム全体はアルミニウムプロファイルで作られています。固体構造があり、安定した信頼性の高い把握プロセスを確保します。 3. 調整可能なグラブ歯: グリッパーの両側のグラブ歯は手動で調整できます。この調整は、異なる仕様バッグの要件を満たすことができます。 4. 歯の素材と間隔をつかむ: グラブ歯はアルミニウム合金で作られています。グラブ歯の間隔は、コードマシンローラーの中心距離と一致しています。 |
|
|
|
|

| グリッパー構造 | クローフィンガータイプスペシャルバッググリッパー |
| ロボットを使用した接続方法 | フランジ接続 |
| クランプデバイスストローク(mm) | 150 |
| デバイスストロークの開閉 | 200 |
| ドライブメソッド | シリンダードライブ |
| 空気圧コンポーネントブランド構成 | 日本SMC |
| 該当する製品仕様 | 顧客が提供する製品仕様に基づいています |

|
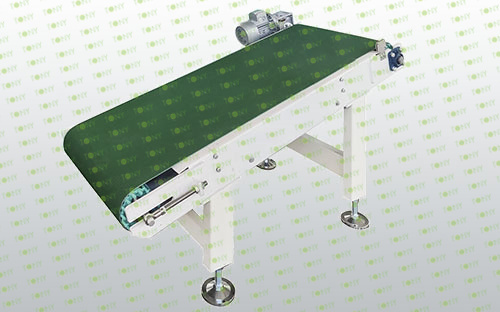
クライミングベルトコンベアは、材料を低い場所から必要な高さまで輸送します。主にフレーム、コンベアベルト、ローラー、ローラー、張力装置、トランスミッションデバイスなどで構成されています。 フレームは、スプレーコーティングされた表面、固体で信頼性の高い構造、3.5〜4mmのプレートの厚さを備えた高品質の炭素鋼で作られています。 両側のガイドプレート、ガイドプレートの位置を調整できます。 高品質のPVCベルトは、滑らかな輸送に使用されます。 有名な国内ブランドモーターによって駆動されます。 約L1600×W650(有効幅)×H370〜H900、高さ調整可能±50mm; 光電子検出ポジショニングデバイスは、コンベアの端に設定されています。 光電子検出スイッチ:オムロンまたは同等のブランド モーターは保護カバーで覆う必要があります。これは、材料がモーターを腐食させるのを防ぐために耐食性である必要があります |
||||||||||||||||||||||
| 関連する構成 | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
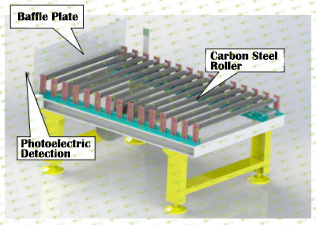
コード待機ローラーコンベアは、つかむ前に材料バッグを見つけて検出するために使用され、グラブするためにロボットにポジション内信号を提供します。主な構造とパラメーターは次のとおりです。 フレームは炭素鋼のプロファイルで作られており、構造は硬くて信頼性が高く、プレートの厚さは3〜4mmです。 ローラーはスプロケット炭素鋼ローラーで作られています。 有名な国内ブランドモーターによって駆動されます。 運搬の高さは900±50mm調整可能です。 コンベアの全体的な寸法は、約L1040×W650mm(有効幅)です。 光電子検出インポジットデバイスは、コンベアの最後に設定されています。 光電子検出スイッチ:オムロンまたは同等のブランド モーターは保護カバーで覆う必要があります。これは、材料がモーターを腐食させるのを防ぐために耐食性である必要があります |
||||||||||||||||
| 関連する構成 | ||||||||||||||||
 |
|
|||||||||||||||

|
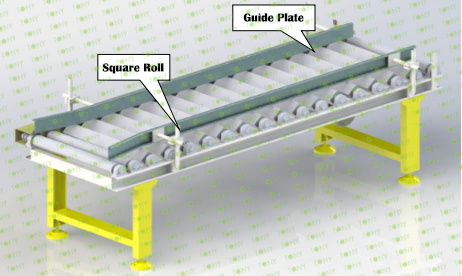
正方形のローラーシェーピングコンベアは、四角ローラーによって生成された振動を使用して、バッグに材料を均等に配布し、バッグを全体として平らにします。主な構造とパラメーターは次のとおりです。 フレームはスチールで作られており、構造は硬くて信頼性が高く、プレートの厚さは3〜4mmです。 両側のガイドプレートは炭素鋼で作られており、ガイドプレートの位置は調整可能です。 コンベアローラーは、滑らかな表面の炭素鋼ローラーで作られています。 有名な国内ブランドモーターによって駆動されます。 運搬の高さは900±50mm調整可能です。 シェーピングコンベアの全体的な寸法は、約L2000×W650mm(ローラーの有効幅)です。 光電子検出ポジショニングデバイスは、コンベアの端に設定されています。 光電子検出スイッチ:オムロンまたは同等のブランド モーターは保護カバーで覆われている必要があります。保護カバーは、材料がモーターを腐食させるのを防ぐために耐食性である必要があります。正方形ローラー型マシンの外観 |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1。電源(単一の生産ライン) 電源電圧:AC380V±10%50Hz 制御電源:DC24V 消費電力:〜8kw |
2。空気供給(単一生産ライン) 標準的な計器空気 圧力:0.4~0.6mpa 空気消費:3°5 nm3/h |
|
3。環境 温度:-10~+50℃ 湿度:≤90%(凝縮なし) |
4。フロア 厚さ:18cm以上の標準コンクリート |


|
24時間のオンラインサービス。 -Inquiryは2時間以内に返信されます。 - 注文から配達まで提供されるすべての道路追跡サービス。 - 運用、デバッグ、毎日のメンテナンスのためのフリートレーニング。 - プロフェッショナルガイドのインストールを提供できます。 - 1年間の保証とオールラウンドアフターセールスサービス。 - クライアントが顧客が利用できます。 - 独立したR&DチームおよびStrict&Scientific Management System |
 |





2025 Tony Machinery -All Rights Reserved。 地図