
 |
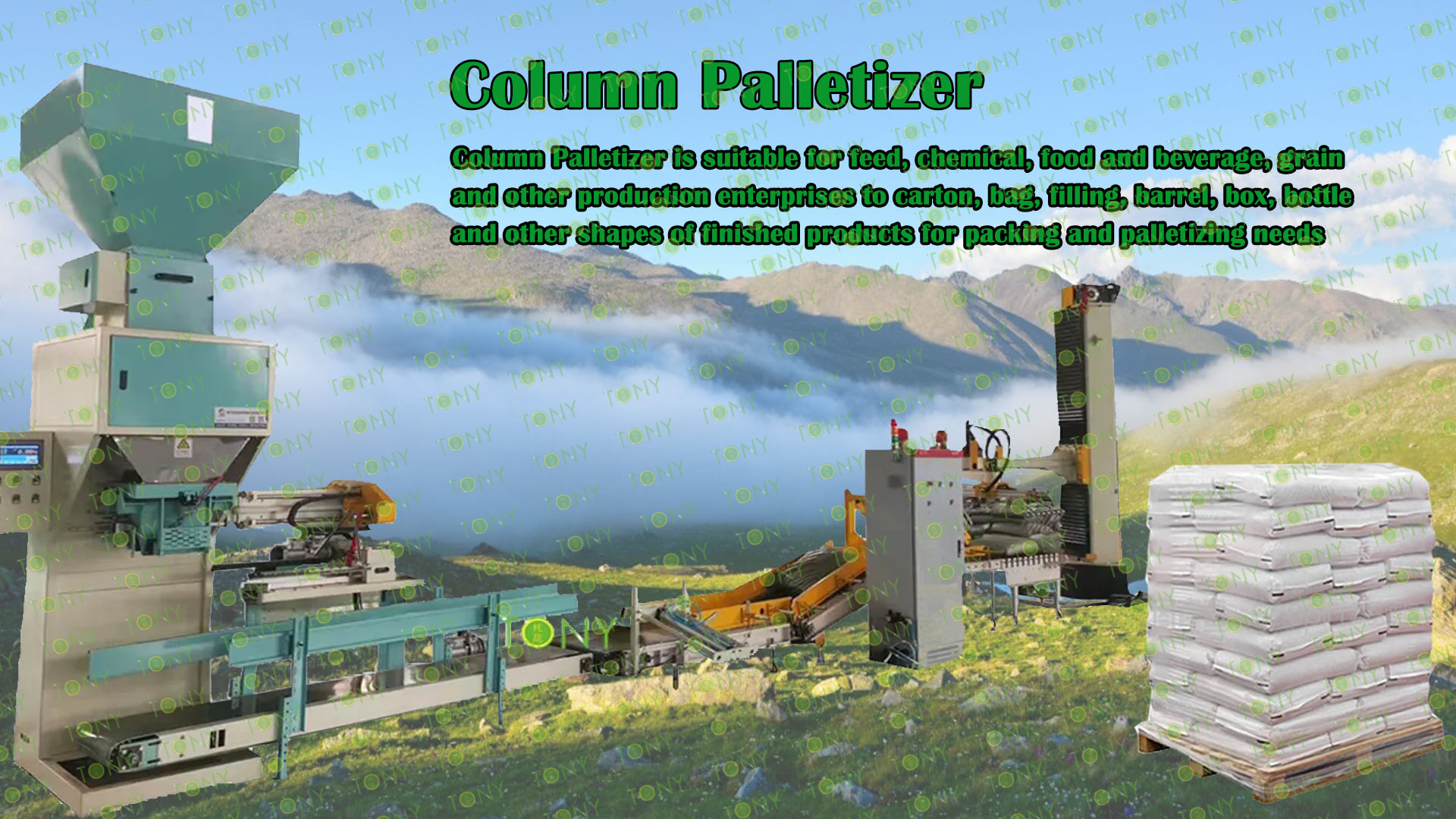
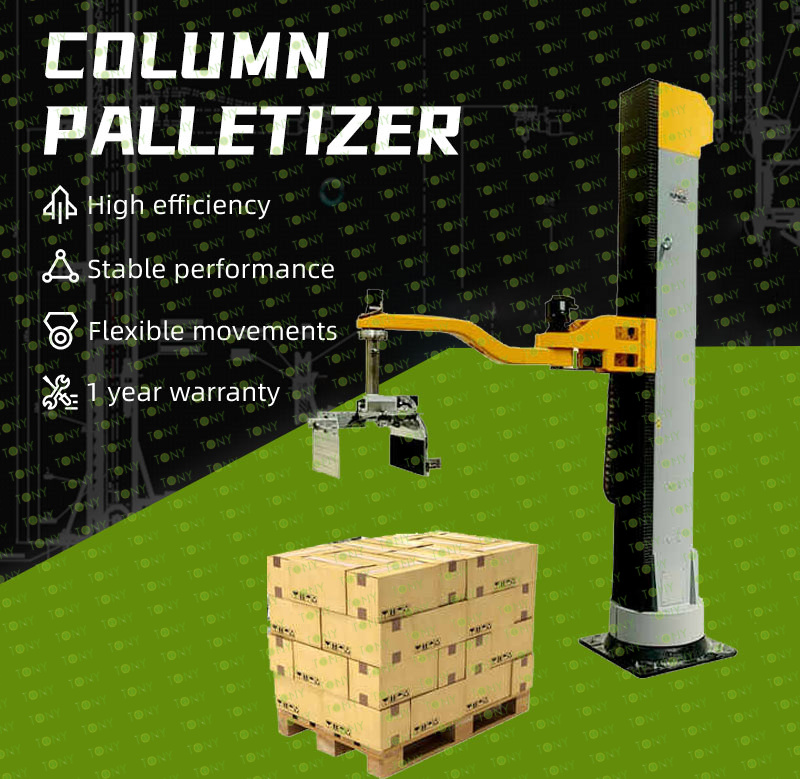
Robot lajur siri Tony mempunyai penggerak linear yang unik, reka bentuk lengan penjimatan tenaga dan mesra alam, antara muka operasi mudah dan grippers yang disesuaikan. Mereka boleh menyediakan penyelesaian robot profesional yang disesuaikan untuk garis dan bahan pengeluaran yang berbeza. Prestasi ketepatan dan kelajuan yang sangat baik, cekap dan stabil membolehkan satu robot untuk menyelesaikan keperluan palletisasi pelbagai barisan pengeluaran pada masa yang sama. Robot mempunyai kapasiti beban 50kg-80kg dan sesuai untuk makanan, kimia, bijirin dan minyak, makanan, bahan binaan, bahan kimia harian, alkohol, minuman, perubatan, peralatan rumah, 3C elektronik dan industri lain. |

|
Palletizer lajur menyedari titik interpolasi linear titik melalui sistem kawalan robot, menjadikan pergerakan licin dan fasih. Prinsip kerjanya adalah seperti berikut: 1. Pengangkutan dan Kedudukan Bahan: Bahan yang dibungkus diangkut ke kawasan palletizing yang ditetapkan melalui penghantar. Bahan -bahan ini kemudian diposisikan. 2. Posisi perlawanan: Robot menggerakkan perlawanan ke bahagian atas kedudukan bahan melalui koordinasi setiap paksi. 3. Pemilihan bahan: Apabila isyarat kedudukan bahan dikeluarkan, perlawanan bergerak ke bawah melalui servo - kawalan motor. Ia kemudian mengambil bahan tersebut. 4. Pengangkutan dan Penempatan Bahan: Selepas mengambil bahan, perlawanan mengangkutnya ke bahagian atas kedudukan palletizing. Ini membolehkan bahan untuk mencapai titik penempatan. Seterusnya, bahan itu disusun ke kedudukan yang ditetapkan. 5. Operasi Repeated: Ulangi tindakan di atas sehingga seluruh palet selesai. |
 |

 |
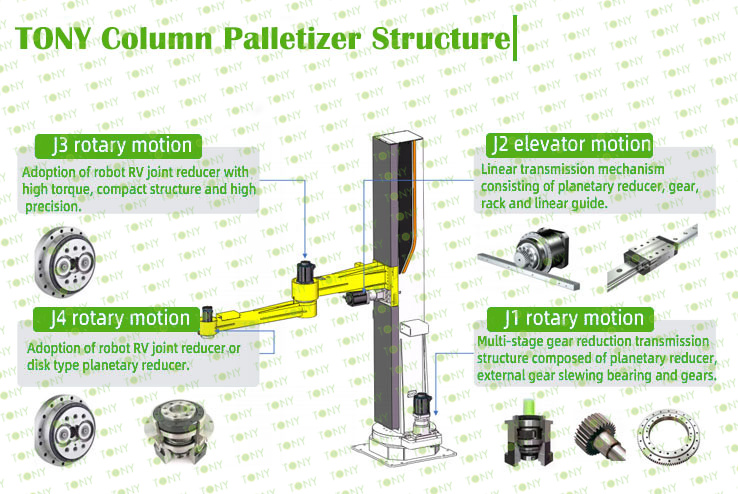
1. Penggerak linear unik: Mekanisme bersama empat paksi yang bijak menjadikan program gerakan robot lebih mudah dan kawalan lebih tepat. 2. Reka bentuk lengan robot yang menjimatkan tenaga dan mesra alam: Pengeluaran kekuatan tinggi dan munasabah bukan sahaja menjadikan pergerakan lengan lebih fleksibel, tetapi juga mengurangkan kehilangan tenaga. 3. Operasi pengajaran mudah dan antara muka operasi grafik yang mesra:Terdapat beberapa kedudukan pengajaran dan antara muka operasi adalah mudah, menjadikan debugging di tapak lebih mudah dan sangat meningkatkan kecekapan di tapak. 4. Pemantauan di tapak masa nyata: Perisian simulasi gerakan di tapak tinggi dapat jauh memahami sama ada program di tapak beroperasi secara normal, dan secara automatik memantau gangguan untuk mengelakkan perlanggaran gangguan. 5. Simulasi di lokasi pra-pembayaran: Menggunakan perisian simulasi/pengaturcaraan 3D yang kuat, anda boleh dengan mudah melengkapkan pengaturcaraan robot, susun atur, pemantauan gangguan, simulasi gerakan di tapak dan siri kerja lain di pejabat, yang menjadi mudah dan berkesan, dengan itu mengurangkan masa debugging di tapak dan meningkatkan kecekapan pengeluaran keseluruhan. |


|
1 |
Kapasiti palletizing |
350-400 kali/jam |
|
2 |
Lapisan palletizing |
5-10 lapisan |
|
3 |
Ketinggian stacking maksimum |
1.9 meter |
|
4 |
Penyimpanan program tanpa had |
Tidak terhad |
|
5 |
Palletizing Waktu Kerja |
Operasi berterusan 24 jam |
|
6 |
Persekitaran Palletizing |
Memenuhi persekitaran pengeluaran pembeli |

 |
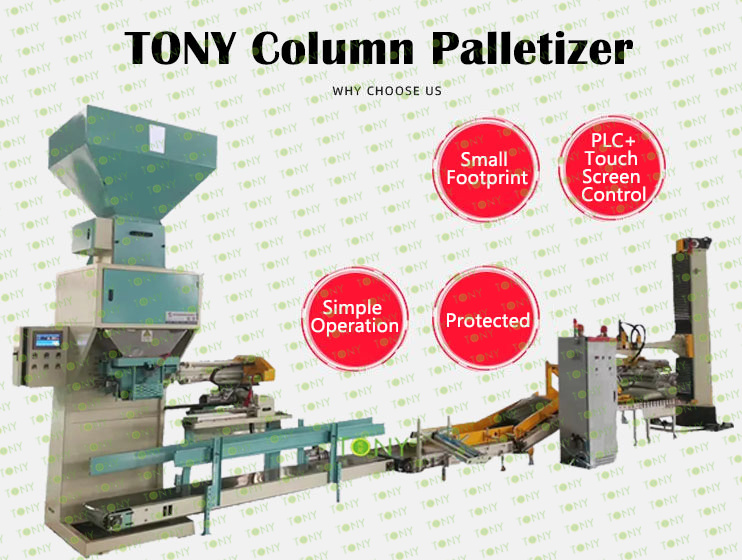
Keupayaan kerja berterusan yang kuat: Palletizer menegak boleh berfungsi secara berterusan selama 8 jam dan boleh menggantikan 3-4 pekerja, dengan itu menjimatkan kos buruh. Kebolehgunaan yang kuat: Palletizer menegak sesuai untuk pelbagai senario dan boleh digunakan untuk operasi palletizing pada pelbagai pengeluaran. Ia mempunyai struktur kecil dan menduduki kawasan kecil. Ketepatan operasi yang tinggi: Palletizer menegak mengawal pergerakan penggenggam melalui program, dan palet yang disusun tegas dan tidak akan runtuh, yang kondusif untuk pengurusan pengangkutan dan penyimpanan produk. Tahap automasi yang tinggi: Palletizer menegak mengamalkan pemacu servo penuh, dengan pergerakan yang tepat, ketepatan operasi yang tinggi, pelbagai kerja yang besar, dan sistem kawalan bebas untuk memastikan ketepatan operasi. Prestasi kos tinggi: Palletizer menegak adalah berpatutan, hanya satu pertiga daripada robot palletizing, dan mempunyai kos aplikasi komprehensif yang rendah, kos penyelenggaraan yang rendah, dan kadar kegagalan yang rendah. Struktur Mudah: Palletizer menegak mempunyai struktur yang mudah dan mudah dikekalkan. Ia hanya perlu melincirkan galas secara berkala, yang mengurangkan kos penyelenggaraan. Hayat perkhidmatan yang panjang: Oleh kerana struktur mekanikalnya, palletizer menegak mempunyai hayat perkhidmatan yang panjang dan pada dasarnya tidak memerlukan penyelenggaraan rumit. |

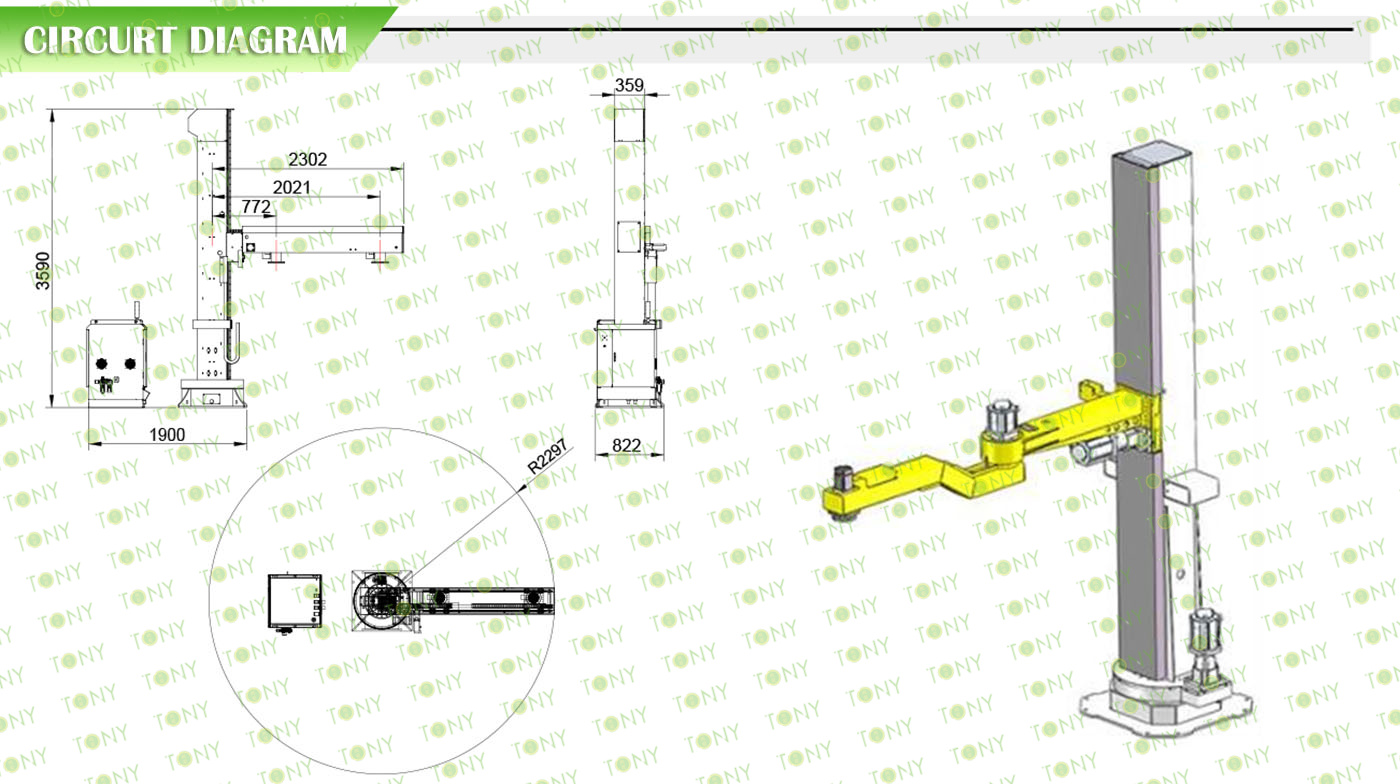
| Julat gerakan | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900mm | |
| J4 | ±240° | |
| Beban maksimum | 120kg | |
| Keupayaan kerja | 350-400pakej | |
| Bekalan kuasa | 380V 50HzTiga fasa empat wayar | |
| Kuasa operasi | 5.7kW | |
| Saiz unit utama | L3090mm×W1000mm×H3360mm(model baru) | |
| Ketinggian menyusun | 1900mm | |
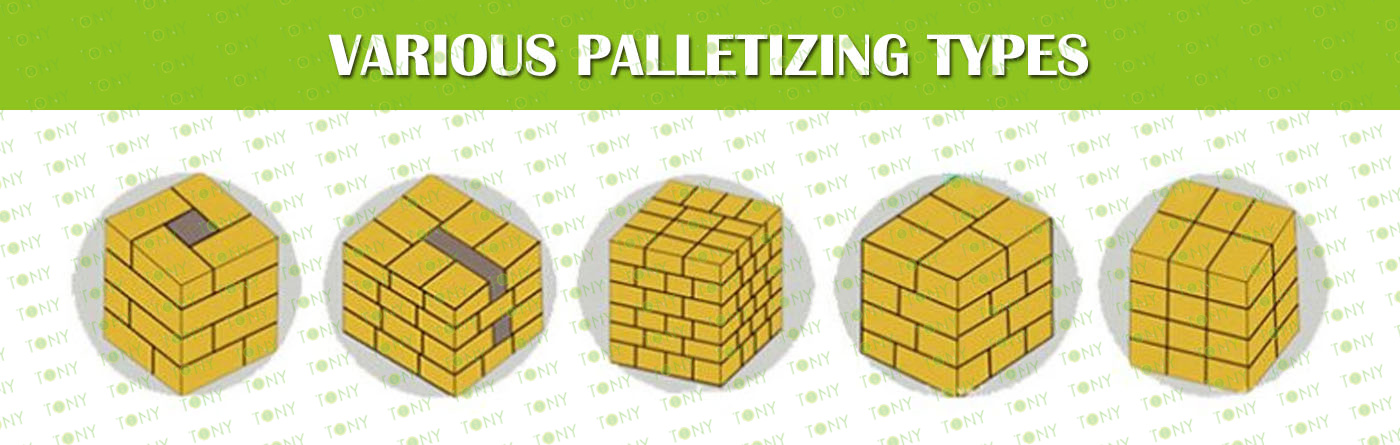
| Bentuk menyusun | Lima berbunga, enam bunga, dll. | |
| Tekanan bekalan udara | 0.6-0.8mA | |
| Berat peralatan | 1400kg | |
| Nama dan model palletizer | GJ-LZ400 |
| Kebebasan Bergerak (paksi) | 4 |
| Kapasiti beban maksimum (kg) | 80 |
| Ulangi ketepatan kedudukan (mm) | ±1mm |
| Mod pemacu | Pemacu servo |
| Pembawa | Pengapit |
| Memori palletizing | Memori pintar |
| Liputan Maksimum (mm) | 2350 |
| Liputan Maksimum (mm) | 925 |

|
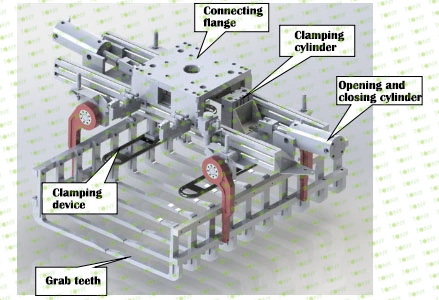
1. PenggenggamTaip dan peranti: Ia mengamalkan cakar - Jenis Jari Jenis Khas Bag Khas. Ia dilengkapi dengan peranti pengapit pneumatik dan peranti pembukaan/penutup pneumatik. 2. Struktur bingkai: Seluruh bingkai diperbuat daripada profil aluminium. Ia mempunyai struktur yang kukuh, memastikan proses menggenggam yang stabil dan boleh dipercayai. 3. Gigi ambil boleh laras: Gigi merebut di kedua -dua belah penggenggam boleh diselaraskan secara manual. Pelarasan ini dapat memenuhi keperluan beg spesifikasi yang berbeza. 4. Dapatkan bahan gigi dan jarak: Gigi ambil diperbuat daripada aloi aluminium. Jarak gigi merebut selaras dengan jarak pusat roller mesin kod. |
|
|
|
|

| Struktur Gripper | Cakar Jenis Jari Khas Penggenggu Beg Khas |
| Kaedah sambungan dengan robot | Sambungan bebibir |
| Strok peranti pengapit (mm) | 150 |
| Strok Peranti Pembukaan/Penutup (mm) | 200 |
| Kaedah pemacu | Pemacu silinder |
| Konfigurasi Jenama Komponen Pneumatik | Jepun SMC |
| Spesifikasi produk yang berkenaan | Berdasarkan spesifikasi produk yang disediakan oleh pelanggan |

|
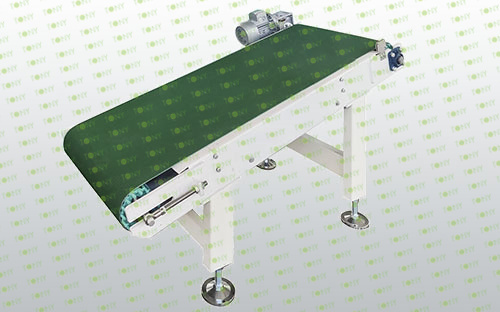
Pengangkut tali pinggang pendakian mengangkut bahan dari tempat yang rendah ke ketinggian yang diperlukan. Ia terutamanya terdiri daripada bingkai, tali pinggang penghantar, penggelek, penggelek, peranti ketegangan, peranti penghantaran, dll. Bingkai ini diperbuat daripada keluli karbon berkualiti tinggi, dengan permukaan bersalut semburan, struktur pepejal dan boleh dipercayai, dan ketebalan plat 3.5-4mm; Plat panduan di kedua -dua belah pihak, kedudukan plat panduan boleh diselaraskan; Sabuk PVC berkualiti tinggi digunakan untuk pengangkutan yang lancar; Didorong oleh motor jenama domestik yang terkenal; Kira -kira L1600 × W650 (lebar berkesan) × H370 ~ H900, ketinggian laras ± 50mm; Peranti kedudukan pengesanan fotoelektrik ditetapkan pada akhir penghantar; Suis pengesanan fotoelektrik: Omron atau jenama yang setara Motor perlu ditutup dengan perlindungan perlindungan, yang perlu tahan kakisan untuk mengelakkan bahan daripada menghancurkan motor |
||||||||||||||||||||||
| Konfigurasi yang berkaitan | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
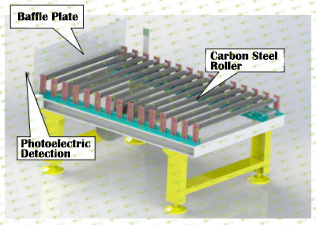
Penghantar roller yang menunggu kod digunakan untuk mencari dan mengesan beg bahan sebelum merebut, dan memberikan isyarat kedudukan kepada robot untuk meraih. Struktur dan parameter utama adalah seperti berikut: Bingkai ini diperbuat daripada profil keluli karbon, strukturnya tegas dan boleh dipercayai, dan ketebalan plat adalah 3-4mm; Roller diperbuat daripada roller keluli karbon sprocket; Ia didorong oleh motor jenama domestik yang terkenal; Ketinggian penyampaian adalah 900 ± 50mm laras; Dimensi keseluruhan penghantar adalah kira -kira L1040 × W650mm (lebar berkesan); Pengesanan fotoelektrik dalam peranti kedudukan ditetapkan pada akhir penghantar; Suis pengesanan fotoelektrik: Omron atau jenama yang setara Motor perlu ditutup dengan perlindungan perlindungan, yang perlu tahan kakisan untuk mengelakkan bahan daripada menghancurkan motor |
||||||||||||||||
| Konfigurasi yang berkaitan | ||||||||||||||||
 |
|
|||||||||||||||

|
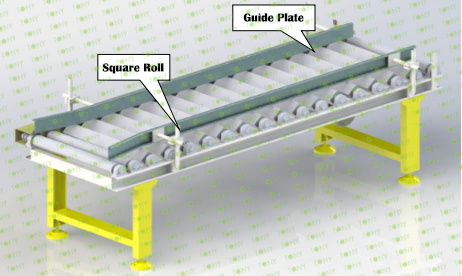
Penghantar roller persegi menggunakan getaran yang dihasilkan oleh roller persegi untuk mengedarkan bahan secara merata di dalam beg dan membuat beg rata secara keseluruhan. Struktur dan parameter utama adalah seperti berikut: Bingkai diperbuat daripada keluli, strukturnya tegas dan boleh dipercayai, dan ketebalan plat adalah 3-4mm; Plat panduan di kedua -dua belah diperbuat daripada keluli karbon, dan kedudukan plat panduan boleh laras; Penggelek penghantar diperbuat daripada penggelek keluli karbon dengan permukaan licin; Ia didorong oleh motor jenama domestik yang terkenal; Ketinggian penyampaian adalah 900 ± 50mm laras; Dimensi keseluruhan penghantar pembentukan adalah kira -kira L2000 × W650mm (lebar berkesan roller); Peranti kedudukan pengesanan fotoelektrik ditetapkan pada akhir penghantar; Suis pengesanan fotoelektrik: Omron atau jenama yang setara Motor perlu ditutup dengan perlindungan perlindungan, yang perlu tahan kakisan untuk mencegah bahan dari menghancurkan motor. Penampilan mesin pembentuk roller persegi |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. Bekalan Kuasa (barisan pengeluaran tunggal) Voltan Bekalan Kuasa: AC380V ± 10% 50Hz Bekalan Kawalan Kawalan: DC24V Penggunaan Kuasa: ~ 8kW |
2. Bekalan udara (barisan pengeluaran tunggal) Udara instrumen standard Tekanan: 0.4 ~ 0.6MPa Penggunaan Udara: 3 ~ 5 nm3/j |
|
3. Persekitaran Suhu: -10 ~+50 ℃ Kelembapan: ≤90% (tiada pemeluwapan) |
4 lantai Ketebalan: ≥18cm konkrit standard |


|
Perkhidmatan dalam talian 24 jam. -Inquiry akan dijawab dalam masa 2 jam. -All-the-way Service yang ditawarkan dari membuat pesanan ke penghantaran. Latihan bebas untuk operasi, debugging dan penyelenggaraan harian. -Kami boleh menyediakan pemasangan panduan profesional. -Satu tahun jaminan dan perkhidmatan selepas jualan sepanjang tahun. -Sekomisasi reka bentuk dan aliran disediakan untuk pelanggan kami. -Semaya Pasukan R & D dan Sistem Pengurusan Saintifik & Saintifik |
 |





2025 Tony Machinery - Semua hak terpelihara. Peta