
 |
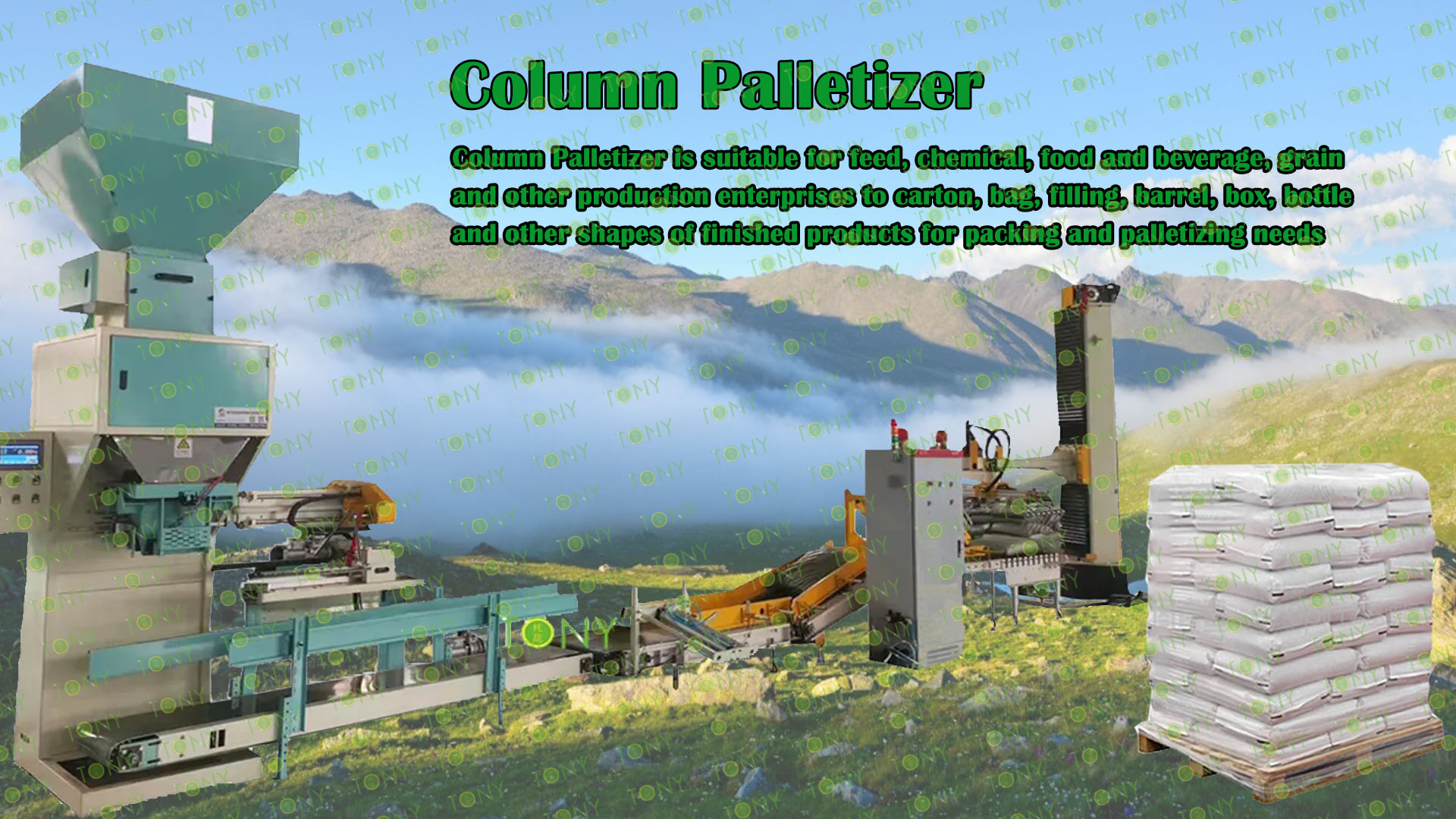
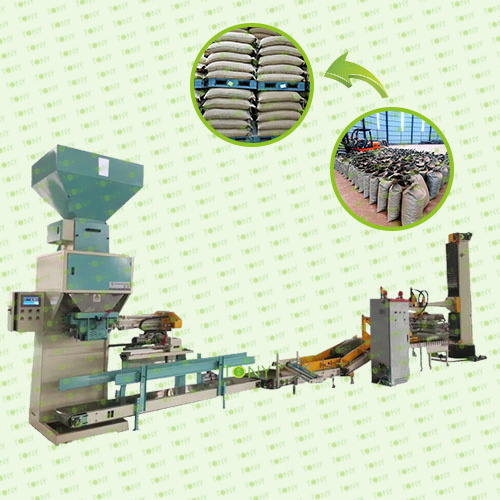
หุ่นยนต์คอลัมน์ Tony Series มีแอคทูเอเตอร์เชิงเส้นที่ไม่เหมือนใครการออกแบบแขนและการออกแบบที่เป็นมิตรกับสิ่งแวดล้อมอินเทอร์เฟซการทำงานที่เรียบง่ายและการจับที่กำหนดเอง พวกเขาสามารถจัดหาโซลูชั่นหุ่นยนต์มืออาชีพที่กำหนดเองสำหรับสายการผลิตและวัสดุที่แตกต่างกัน ความแม่นยำและความเร็วที่ยอดเยี่ยมประสิทธิภาพที่มีประสิทธิภาพและเสถียรช่วยให้หุ่นยนต์หนึ่งตัวสามารถทำตามข้อกำหนดด้านพาเลทของสายการผลิตหลายสายในเวลาเดียวกัน หุ่นยนต์มีความสามารถในการรับน้ำหนัก 50 กิโลกรัม-80 กิโลกรัมและเหมาะสำหรับอาหาร, สารเคมี, ธัญพืชและน้ำมัน, อาหาร, วัสดุก่อสร้าง, สารเคมีทุกวัน, แอลกอฮอล์, เครื่องดื่ม, ยา, เครื่องใช้ในบ้าน, อุปกรณ์อิเล็กทรอนิกส์ 3C และอุตสาหกรรมอื่น ๆ |

|
คอลัมน์พาเลทเซอร์ตระหนักถึงจุด - ไป - จุดการแก้ไขเชิงเส้นผ่านระบบควบคุมหุ่นยนต์ทำให้การเคลื่อนไหวราบรื่นและคล่องแคล่ว หลักการทำงานของมันมีดังนี้: 1. การขนส่งและการวางตำแหน่งวัสดุ: วัสดุที่บรรจุจะถูกส่งไปยังพื้นที่พาเลทที่กำหนดผ่านสายพานลำเลียง วัสดุเหล่านี้จะอยู่ในตำแหน่ง 2. การจัดวางตำแหน่ง: หุ่นยนต์จะย้ายการติดตั้งไปที่ด้านบนของการวางตำแหน่งวัสดุผ่านการประสานงานของแต่ละแกน 3. การเลือกวัสดุ: เมื่อมีการออกสัญญาณการวางตำแหน่งวัสดุการติดตั้งจะเคลื่อนที่ลงผ่านการควบคุมเซอร์โว - มอเตอร์ จากนั้นก็หยิบวัสดุขึ้นมา 4. การขนส่งวัสดุและตำแหน่ง: หลังจากหยิบวัสดุขึ้นมาแล้วการติดตั้งจะส่งไปยังด้านบนของตำแหน่งพาเลท สิ่งนี้ช่วยให้วัสดุไปถึงจุดตำแหน่ง ต่อจากนั้นวัสดุจะถูกซ้อนกันในตำแหน่งที่กำหนด 5. การดำเนินการซ้ำ: ทำซ้ำการกระทำข้างต้นจนกว่าพาเลททั้งหมดจะเสร็จสิ้น |
 |

 |
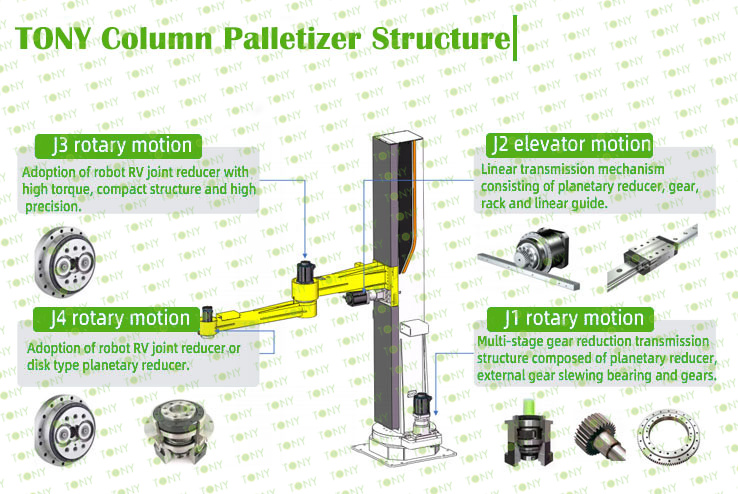
1. แอคชูเอเตอร์เชิงเส้นที่ไม่ซ้ำกัน: กลไกข้อต่อสี่แกนที่ฉลาดทำให้โปรแกรมการเคลื่อนไหวของหุ่นยนต์ง่ายขึ้นและการควบคุมแม่นยำยิ่งขึ้น 2. การออกแบบแขนหุ่นยนต์ประหยัดพลังงานและเป็นมิตรกับสิ่งแวดล้อม: การผลิตที่มีความแข็งแรงสูงและสมเหตุสมผลไม่เพียง แต่ทำให้การเคลื่อนไหวของแขนมีความยืดหยุ่นมากขึ้น แต่ยังช่วยลดการสูญเสียพลังงาน 3. การดำเนินการสอนอย่างง่ายและอินเทอร์เฟซการทำงานกราฟิกที่เป็นมิตร:มีตำแหน่งการสอนน้อยและอินเทอร์เฟซการดำเนินงานนั้นง่ายทำให้การดีบักในสถานที่ง่ายขึ้นและปรับปรุงประสิทธิภาพในสถานที่ได้อย่างมาก 4. การตรวจสอบในสถานที่เรียลไทม์: ซอฟต์แวร์การจำลองการเคลื่อนไหวในสถานที่ที่มีความแม่นยำสูงสามารถเข้าใจได้จากระยะไกลว่าโปรแกรมในสถานที่ทำงานตามปกติหรือไม่และตรวจสอบการรบกวนโดยอัตโนมัติเพื่อหลีกเลี่ยงการชนกันรบกวน 5. การจำลองสถานที่ก่อนการวาง: การใช้ซอฟต์แวร์จำลอง/การเขียนโปรแกรม 3 มิติที่ทรงพลังคุณสามารถทำการเขียนโปรแกรมหุ่นยนต์เค้าโครงการตรวจสอบสัญญาณรบกวนการจำลองการเคลื่อนไหวในสถานที่และการทำงานอื่น ๆ ในสำนักงานซึ่งกลายเป็นเรื่องง่ายและมีประสิทธิภาพซึ่งจะช่วยลดเวลาในการดีบักในสถานที่และปรับปรุงประสิทธิภาพการผลิตโดยรวม |


|
1 |
ความจุพาเลท |
350-400 ครั้ง/ชั่วโมง |
|
2 |
ชั้นพาเลท |
5-10 ชั้น |
|
3 |
ความสูงของการซ้อนสูงสุด |
1.9 เมตร |
|
4 |
ที่เก็บโปรแกรมไม่ จำกัด |
ไม่ จำกัด |
|
5 |
เวลาทำงานแบบพาเลท |
24 ชั่วโมงการทำงานต่อเนื่อง |
|
6 |
สภาพแวดล้อมแบบพาเลท |
พบกับสภาพแวดล้อมการผลิตของผู้ซื้อ |

 |
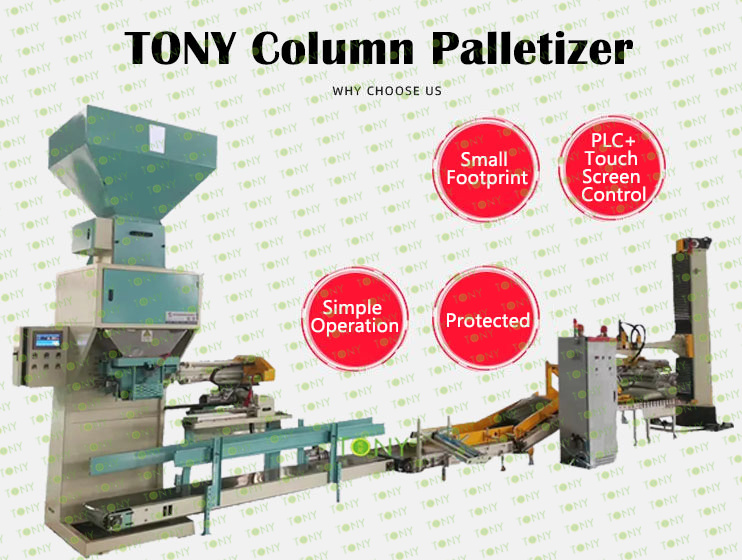
ความสามารถในการทำงานอย่างต่อเนื่องที่แข็งแกร่ง: palletizer แนวตั้งสามารถทำงานได้อย่างต่อเนื่องเป็นเวลา 8 ชั่วโมงและสามารถแทนที่คนงาน 3-4 คนซึ่งจะช่วยประหยัดค่าแรง การบังคับใช้ที่แข็งแกร่ง: palletizer แนวตั้งเหมาะสำหรับสถานการณ์ที่หลากหลายและสามารถใช้สำหรับการดำเนินการ palletizing ในหลายสายการผลิต มันมีโครงสร้างขนาดเล็กและอยู่พื้นที่เล็ก ๆ ความแม่นยำในการใช้งานสูง: palletizer แนวตั้งควบคุมการเคลื่อนไหวของกริปเปอร์ผ่านโปรแกรมและพาเลทแบบเรียงซ้อนนั้นมั่นคงและจะไม่ล่มสลายซึ่งเอื้อต่อการจัดการการขนส่งและการจัดเก็บข้อมูลของผลิตภัณฑ์ ระบบอัตโนมัติระดับสูง: palletizer แนวตั้งใช้ไดรฟ์เซอร์โวเต็มรูปแบบพร้อมการเคลื่อนไหวที่แม่นยำความแม่นยำในการทำงานสูงช่วงการทำงานขนาดใหญ่และระบบควบคุมอิสระเพื่อให้แน่ใจว่ามีความแม่นยำในการทำงาน ประสิทธิภาพที่มีต้นทุนสูง: palletizer แนวตั้งมีราคาไม่แพงเพียงหนึ่งในสามของหุ่นยนต์พาเลทและมีต้นทุนการใช้งานที่ครอบคลุมต่ำต้นทุนการบำรุงรักษาต่ำและอัตราความล้มเหลวต่ำ โครงสร้างที่เรียบง่าย: palletizer แนวตั้งมีโครงสร้างที่เรียบง่ายและง่ายต่อการบำรุงรักษา จำเป็นต้องหล่อลื่นแบริ่งเป็นประจำเท่านั้นซึ่งจะช่วยลดค่าใช้จ่ายในการบำรุงรักษา อายุการใช้งานที่ยาวนาน: เนื่องจากโครงสร้างเชิงกลพาเลทเซอร์แนวตั้งมีอายุการใช้งานที่ยาวนานและโดยทั่วไปไม่จำเป็นต้องมีการบำรุงรักษาที่ซับซ้อน |

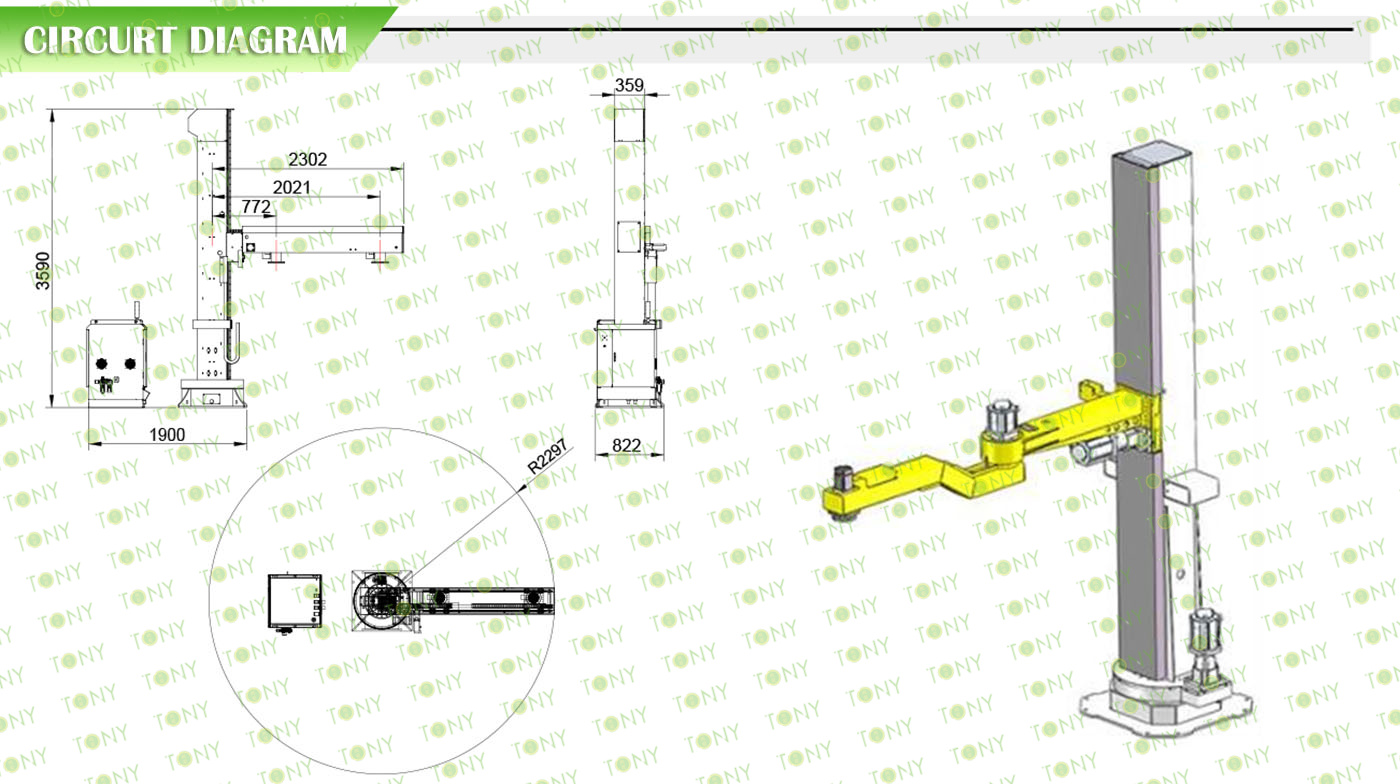
| ช่วงของการเคลื่อนไหว | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900 มม. | |
| J4 | ±240° | |
| โหลดสูงสุด | 120 กิโลกรัม | |
| ความสามารถในการทำงาน | 350-400แพ็คเกจ | |
| แหล่งจ่ายไฟ | 380V 50Hzสามเฟสสี่สาย | |
| กำลังปฏิบัติการ | 5.7kW | |
| ขนาดหน่วยหลัก | L3090 มม.×W1000mm×H3360 มม.(รุ่นใหม่) | |
| ความสูงของซ้อน | 1900 มม. | |
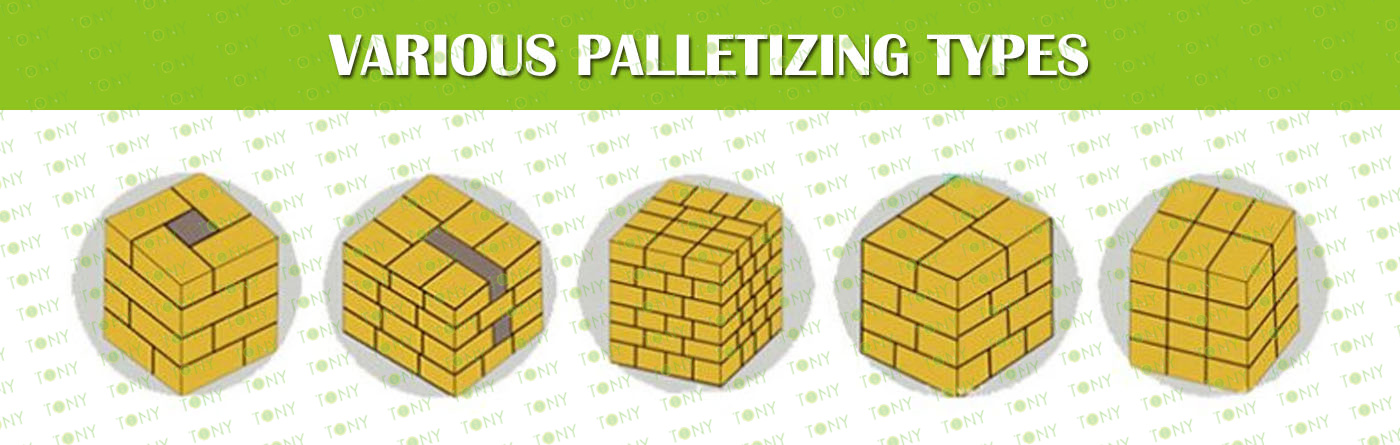
| รูปซ้อน | ห้าดอกหกดอก ฯลฯ | |
| แรงดันอากาศ | 0.6-0.8ma | |
| น้ำหนักอุปกรณ์ | 1400 กิโลกรัม | |
| ชื่อ Palletizer และรุ่น | GJ-LZ400 |
| Freedom of Motion (แกน) | 4 |
| ความสามารถในการโหลดสูงสุด (กก.) | 80 |
| ทำซ้ำความแม่นยำในการวางตำแหน่ง (มม.) | ±1 มม. |
| โหมดไดรฟ์ | เซอร์โวไดรฟ์ |
| ผู้ให้บริการ | หนีบ |
| หน่วยความจำพาเลท | หน่วยความจำอัจฉริยะ |
| ความครอบคลุมสูงสุด (มม.) | 2350 |
| ความครอบคลุมสูงสุด (มม.) | 925 |

|
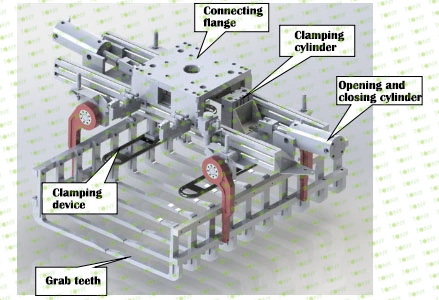
1. กริปเปอร์ประเภทและอุปกรณ์: มันใช้กริปเปอร์พิเศษของกรงเล็บกรงเล็บ มันติดตั้งอุปกรณ์หนีบลมและอุปกรณ์เปิด/ปิดนิวเมติก 2. โครงสร้างเฟรม: เฟรมทั้งหมดทำจากโปรไฟล์อลูมิเนียม มันมีโครงสร้างที่มั่นคงทำให้มั่นใจได้ว่ากระบวนการจับที่มั่นคงและเชื่อถือได้ 3. คว้าฟันปรับได้: ฟันคว้าทั้งสองด้านของกริปเปอร์สามารถปรับได้ด้วยตนเอง การปรับนี้สามารถตอบสนองความต้องการของถุงข้อมูลจำเพาะที่แตกต่างกัน 4. คว้าวัสดุฟันและระยะห่าง: ฟันคว้าทำจากโลหะผสมอลูมิเนียม ระยะห่างของฟันคว้าสอดคล้องกับระยะตรงกลางของลูกกลิ้งเครื่องรหัส |
|
|
|
|

| โครงสร้างกริปเปอร์ | กรงเล็บนิ้วกริปเปอร์พิเศษ |
| วิธีการเชื่อมต่อกับหุ่นยนต์ | การเชื่อมต่อหน้าแปลน |
| Stroke Device Stroke (มม.) | 150 |
| การเปิด/ปิดอุปกรณ์ Stroke (มม.) | 200 |
| วิธีขับเคลื่อน | ไดรฟ์ทรงกระบอก |
| การกำหนดค่าแบรนด์ส่วนประกอบของนิวเมติก | ญี่ปุ่น SMC |
| ข้อกำหนดผลิตภัณฑ์ที่ใช้งานได้ | ตามข้อกำหนดของผลิตภัณฑ์ที่ลูกค้าจัดทำขึ้น |

|
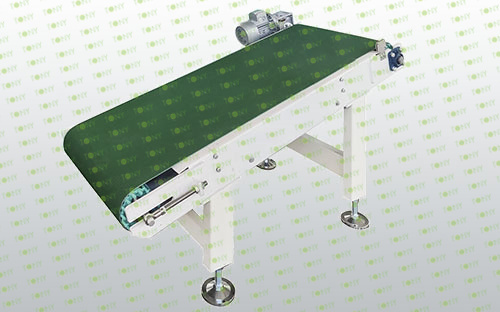
สายพานลำเลียงปีนเขาขนส่งวัสดุจากที่ต่ำไปจนถึงความสูงที่ต้องการ ส่วนใหญ่ประกอบด้วยเฟรม, สายพานลำเลียง, ลูกกลิ้ง, ลูกกลิ้ง, อุปกรณ์ปรับความตึงอุปกรณ์ส่งผ่าน ฯลฯ เฟรมทำจากเหล็กคาร์บอนคุณภาพสูงพร้อมพื้นผิวเคลือบสเปรย์โครงสร้างที่เป็นของแข็งและเชื่อถือได้และความหนาของแผ่น 3.5-4 มม. แผ่นคู่มือทั้งสองด้านตำแหน่งของแผ่นคู่มือสามารถปรับได้ เข็มขัดพีวีซีคุณภาพสูงใช้สำหรับการขนส่งที่ราบรื่น ขับเคลื่อนด้วยมอเตอร์แบรนด์ในประเทศที่รู้จักกันดี ประมาณ L1600 × W650 (ความกว้างที่มีประสิทธิภาพ) × H370 ~ H900, ปรับความสูงได้± 50 มม.; อุปกรณ์วางตำแหน่งการตรวจจับโฟโตอิเล็กทริกถูกตั้งค่าที่ส่วนท้ายของสายพานลำเลียง สวิตช์ตรวจจับโฟโตอิเล็กทริก: omron หรือแบรนด์เทียบเท่า มอเตอร์จะต้องปกคลุมด้วยฝาครอบป้องกันซึ่งจะต้องทนต่อการกัดกร่อนเพื่อป้องกันไม่ให้วัสดุสึกกร่อนมอเตอร์ |
||||||||||||||||||||||
| การกำหนดค่าที่เกี่ยวข้อง | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
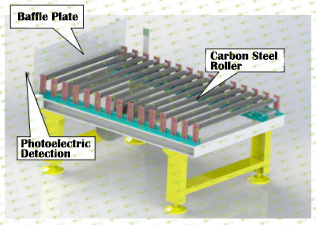
รหัสสายพานลำเลียงที่รอรหัสเพื่อค้นหาและตรวจจับถุงวัสดุก่อนที่จะคว้าและให้สัญญาณในตำแหน่งไปยังหุ่นยนต์เพื่อคว้า โครงสร้างและพารามิเตอร์หลักมีดังนี้: เฟรมทำจากโปรไฟล์เหล็กคาร์บอนโครงสร้างมีความมั่นคงและเชื่อถือได้และความหนาของแผ่นคือ 3-4 มม. ลูกกลิ้งทำจากลูกกลิ้งเหล็กคาร์บอนเฟือง มันถูกขับเคลื่อนด้วยมอเตอร์แบรนด์ในประเทศที่รู้จักกันดี ความสูงของการลำเลียงคือ 900 ± 50 มม. ปรับได้; ขนาดโดยรวมของสายพานลำเลียงประมาณ L1040 × W650 มม. (ความกว้างที่มีประสิทธิภาพ); อุปกรณ์ตรวจจับโฟโตอิเล็กทริกในตำแหน่งตั้งอยู่ที่ส่วนท้ายของสายพานลำเลียง สวิตช์ตรวจจับโฟโตอิเล็กทริก: omron หรือแบรนด์เทียบเท่า มอเตอร์จะต้องปกคลุมด้วยฝาครอบป้องกันซึ่งจะต้องทนต่อการกัดกร่อนเพื่อป้องกันไม่ให้วัสดุสึกกร่อนมอเตอร์ |
||||||||||||||||
| การกำหนดค่าที่เกี่ยวข้อง | ||||||||||||||||
 |
|
|||||||||||||||

|
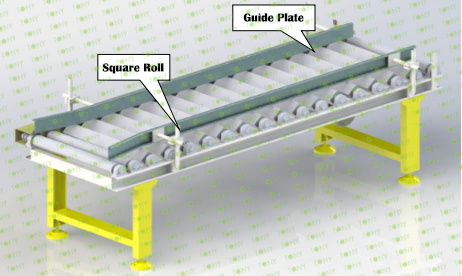
รูปแบบลูกกลิ้งแบบสี่เหลี่ยมจัตุรัสใช้การสั่นสะเทือนที่เกิดจากลูกกลิ้งสี่เหลี่ยมเพื่อกระจายวัสดุอย่างสม่ำเสมอในถุงและทำให้กระเป๋าแบนโดยรวม โครงสร้างและพารามิเตอร์หลักมีดังนี้: เฟรมทำจากเหล็กโครงสร้างมีความมั่นคงและเชื่อถือได้และความหนาของแผ่นคือ 3-4 มม.; แผ่นคู่มือทั้งสองด้านทำจากเหล็กกล้าคาร์บอนและตำแหน่งของแผ่นยึดสามารถปรับได้ ลูกกลิ้งลำเลียงทำจากลูกกลิ้งเหล็กคาร์บอนที่มีพื้นผิวเรียบ มันถูกขับเคลื่อนด้วยมอเตอร์แบรนด์ในประเทศที่รู้จักกันดี ความสูงของการลำเลียงคือ 900 ± 50 มม. ปรับได้; ขนาดโดยรวมของลำเลียงรูปร่างอยู่ที่ประมาณ L2000 × W650 มม. (ความกว้างที่มีประสิทธิภาพของลูกกลิ้ง); อุปกรณ์วางตำแหน่งการตรวจจับโฟโตอิเล็กทริกถูกตั้งค่าที่ส่วนท้ายของสายพานลำเลียง สวิตช์ตรวจจับโฟโตอิเล็กทริก: omron หรือแบรนด์เทียบเท่า มอเตอร์จะต้องถูกปกคลุมด้วยฝาครอบป้องกันซึ่งจะต้องทนต่อการกัดกร่อนเพื่อป้องกันไม่ให้วัสดุสึกกร่อนมอเตอร์ ลักษณะของเครื่องจักรลูกกลิ้งสี่เหลี่ยมจัตุรัส |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. แหล่งจ่ายไฟ (สายการผลิตเดี่ยว) แรงดันไฟฟ้าของแหล่งจ่ายไฟ: AC380V ± 10% 50Hz แหล่งจ่ายไฟควบคุม: DC24V การใช้พลังงาน: ~ 8kw |
2. การจัดหาอากาศ (สายการผลิตเดี่ยว) อากาศเครื่องมือมาตรฐาน ความดัน: 0.4 ~ 0.6MPA ปริมาณการใช้อากาศ: 3 ~ 5 nm3/h |
|
3. สภาพแวดล้อม อุณหภูมิ: -10 ~+50 ℃ ความชื้น: ≤90% (ไม่มีการควบแน่น) |
4. พื้น ความหนา: คอนกรีตมาตรฐาน≥18ซม. |


|
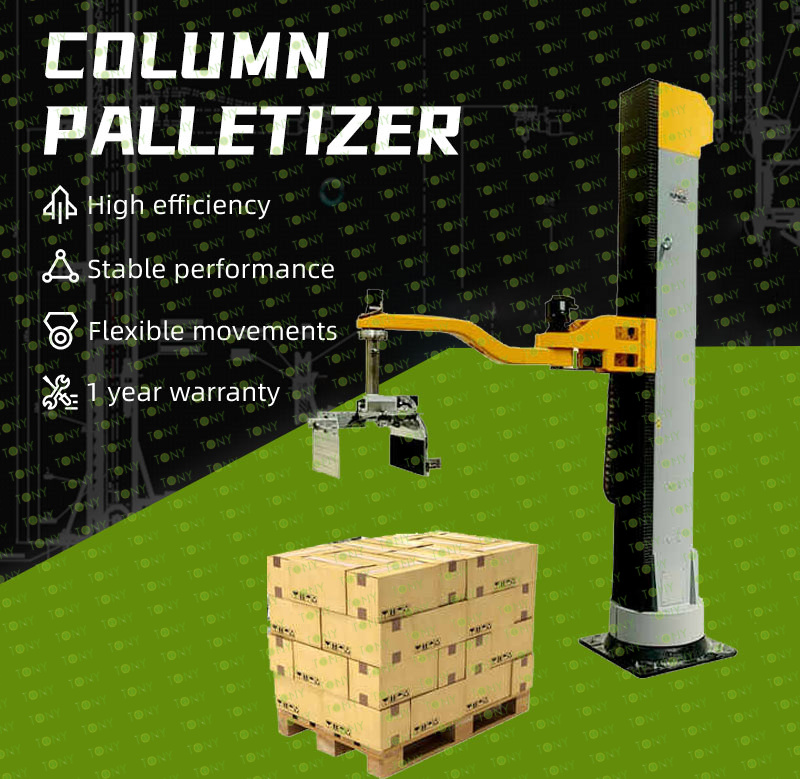
บริการออนไลน์ 24 ชั่วโมง -จะตอบกลับภายใน 2 ชั่วโมง -บริการติดตามทั้งหมดที่เสนอตั้งแต่การสั่งซื้อเพื่อจัดส่ง -การฝึกอบรมฟรีสำหรับการดำเนินการดีบักและการบำรุงรักษารายวัน -เราสามารถให้การติดตั้งคู่มือมืออาชีพ -การรับประกันปีหนึ่งปีและบริการหลังการขายทุกรอบ -แผนภูมิการออกแบบและโฟลว์แบบกำหนดเองมีให้สำหรับลูกค้าของเรา -ทีม R&D อิสระและระบบการจัดการที่เข้มงวดและวิทยาศาสตร์ |
 |





2025 Tony Machinery - สงวนลิขสิทธิ์ แผนที่