
 |
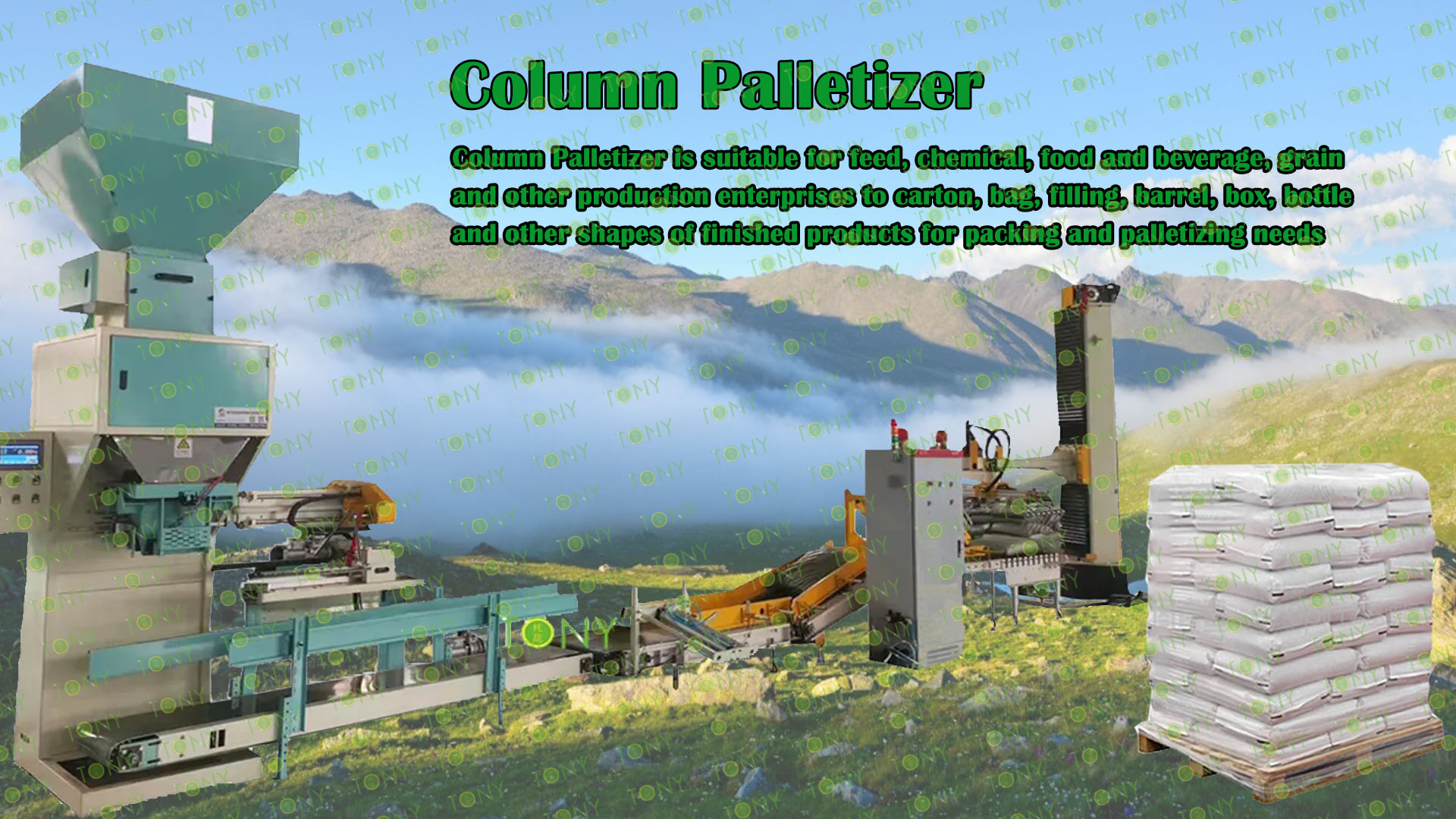
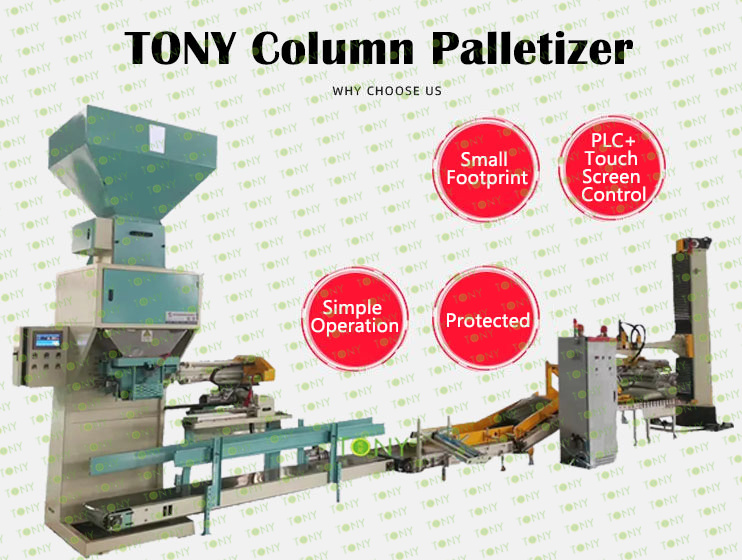
Los robots de la columna de la serie Tony tienen actuadores lineales únicos, diseños de brazos de ahorro de energía y respetuosos con el medio ambiente, interfaces de operación simples y pinzas personalizadas. Pueden proporcionar soluciones de robot profesionales personalizadas para diferentes líneas y materiales de producción. Su excelente precisión y velocidad, rendimiento eficiente y estable permiten a un robot completar los requisitos de paletizantes de múltiples líneas de producción al mismo tiempo. El robot tiene una capacidad de carga de 50 kg-80 kg y es adecuado para alimentos, productos químicos, grano y aceite, alimentos, materiales de construcción, productos químicos diarios, alcohol, bebidas, medicamentos, electrodomésticos, electrónica 3C y otras industrias. |

|
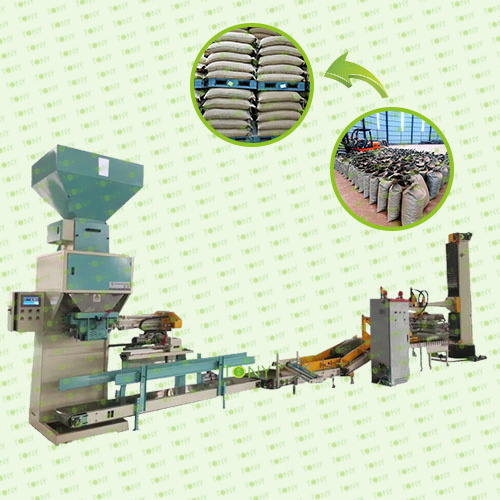
El paletizador de columna realiza la interpolación lineal del punto a punto a través del sistema de control del robot, lo que hace que el movimiento sea suave y fluido. Su principio de trabajo es el siguiente: 1. Transporte y posicionamiento de materiales: los materiales empaquetados se transportan al área de paletización designada a través del transportador. Estos materiales se colocan luego. 2. Posicionamiento de accesorios: el robot mueve el accesorio a la parte superior del posicionamiento del material a través de la coordinación de cada eje. 3. Elección de material: cuando se emite la señal de posicionamiento del material, el accesorio se mueve hacia abajo a través del control del servo -motor. Luego recoge el material. 4. Transporte y colocación del material: después de recoger el material, el accesorio lo transporta a la parte superior de la posición de paletización. Esto permite que el material llegue al punto de colocación. Posteriormente, el material se apila en la posición designada. 5. Operación repetida: repita las acciones anteriores hasta que se complete toda la paleta. |
 |

 |
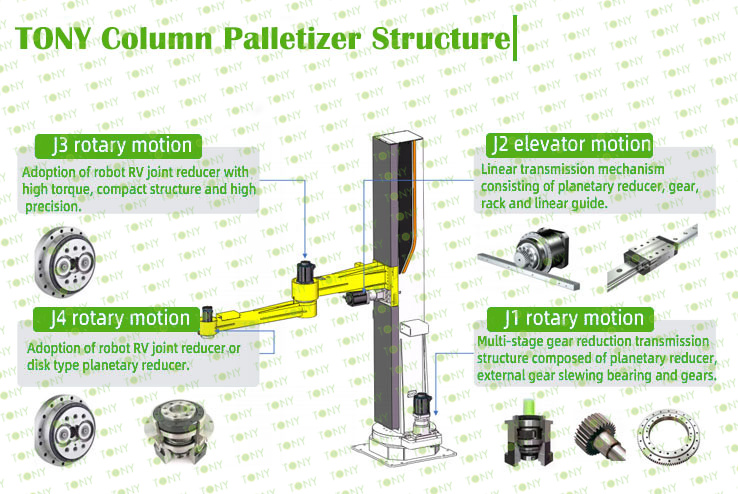
1. Actuador lineal único: El inteligente mecanismo articular de cuatro ejes hace que el programa de movimiento del robot sea más simple y el control más preciso. 2. Diseño de brazo robot de ahorro de energía y ecológico: La producción de alta resistencia y razonable no solo hace que el movimiento del brazo sea más flexible, sino que también reduce la pérdida de energía. 3. Operación de enseñanza simple e interfaz de operación gráfica amigable:Hay pocas posiciones de enseñanza y la interfaz de operación es simple, lo que hace que la depuración en el sitio sea más fácil y mejorando en gran medida la eficiencia en el sitio. 4. Monitoreo en el sitio en tiempo real: El software de simulación de movimiento en el sitio de alta precisión puede comprender de forma remota si el programa en el sitio está funcionando normalmente y monitorear automáticamente la interferencia para evitar colisiones de interferencia. 5. Simulación en el sitio previa al lazo: Utilizando un potente software de simulación/programación 3D, puede completar fácilmente la programación de robots, el diseño, el monitoreo de interferencias, la simulación de movimiento en el sitio y otras series de trabajo en la oficina, que se vuelven simples y efectivos, reduciendo así el tiempo de depuración en el sitio y mejorando la eficiencia general de la producción. |


|
1 |
Capacidad de paletizante |
350-400 veces/hora |
|
2 |
Capas paletizantes |
5-10 capas |
|
3 |
Altura máxima de apilamiento |
1.9 metros |
|
4 |
Almacenamiento de programas ilimitado |
Ilimitado |
|
5 |
Tiempo de trabajo paletizante |
Operación continua de 24 horas |
|
6 |
Ambiente paletizante |
Conozca el entorno de producción del comprador |

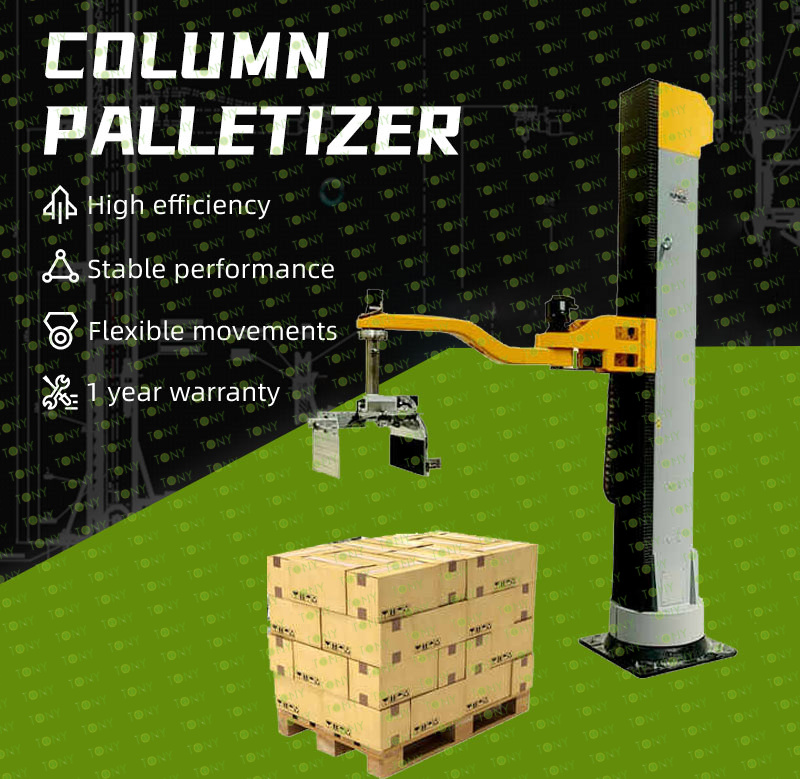 |
Fuerte capacidad de trabajo continua: el paletizador vertical puede funcionar continuamente durante 8 horas y puede reemplazar a 3-4 trabajadores, ahorrando así los costos laborales. Fuerte aplicabilidad: El paletizador vertical es adecuado para una variedad de escenarios y se puede utilizar para las operaciones de paletización en múltiples líneas de producción. Tiene una pequeña estructura y ocupa un área pequeña. Alta precisión de operación: El paletizador vertical controla el movimiento de la pinza a través de un programa, y la paleta apilada es firme y no colapsará, lo que conduce a la gestión de transporte y almacenamiento del producto. Alto grado de automatización: El paletizador vertical adopta la unidad de servo completa, con un movimiento preciso, una alta precisión de operación, un gran rango de trabajo y un sistema de control independiente para garantizar la precisión de la operación. Rendimiento de alto costo: El paletizador vertical es asequible, solo un tercio del robot paletizante, y tiene un bajo costo de aplicación integral, bajo costo de mantenimiento y baja tasa de falla. Estructura simple: El paletizador vertical tiene una estructura simple y es fácil de mantener. Solo necesita lubricar los rodamientos regularmente, lo que reduce los costos de mantenimiento. Larga vida útil: Debido a su estructura mecánica, el paletizador vertical tiene una larga vida útil y básicamente no requiere un mantenimiento complicado. |

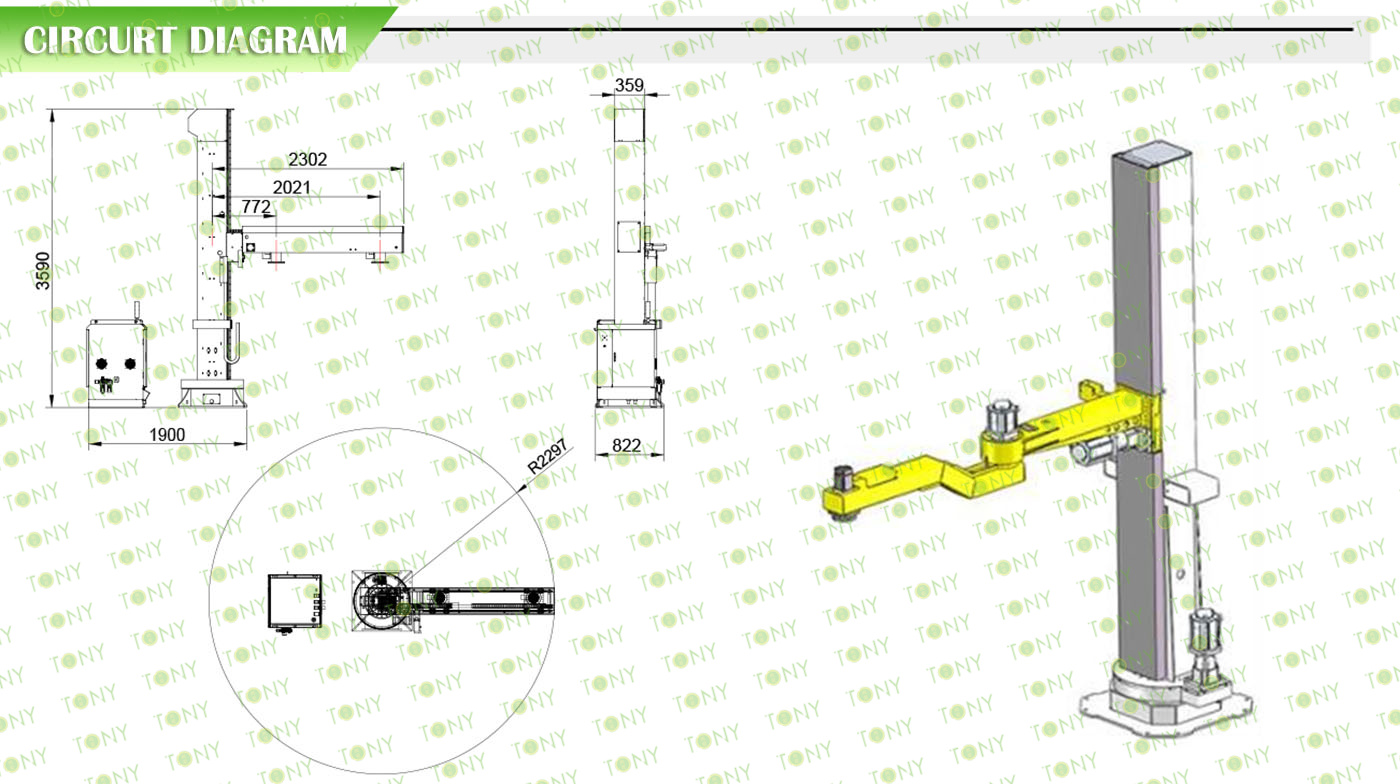
| Rango de movimiento | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900 mm | |
| J4 | ±240° | |
| Carga máxima | 120 kg | |
| Capacidad de trabajo | 350-400paquetes | |
| Fuente de alimentación | 380V 50Hztrifásico de cuatro hilos | |
| Potencia operativa | 5.7kw | |
| Tamaño de la unidad principal | L3090 mm×W1000 mm×H3360 mm(nuevo modelo) | |
| Altura de apilamiento | 1900 mm | |
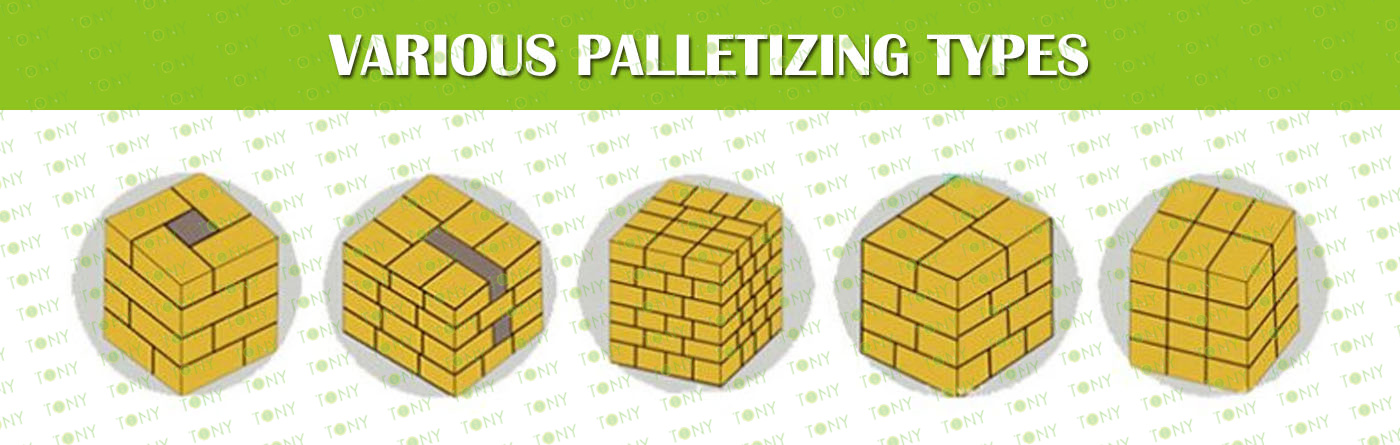
| Forma de apilamiento | Cinco flores, seis flores, etc. | |
| Presión de suministro de aire | 0.6-0.8MA | |
| Peso del equipo | 1400 kg | |
| Nombre y modelo de paletizador | GJ-LZ400 |
| Libertad de movimiento (eje) | 4 |
| Capacidad de carga máxima (kg) | 80 |
| Repita la precisión del posicionamiento (mm) | ±1 mm |
| Modo de conducción | Servo |
| Transportador | Abrazadera |
| Memoria paletizante | Memoria inteligente |
| Cobertura máxima (mm) | 2350 |
| Cobertura máxima (mm) | 925 |

|
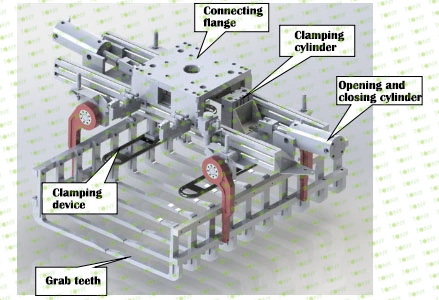
1. AcogedorTipo y dispositivos: Adopta una pinza de bolsa especial de tipo dedo. Está equipado con un dispositivo de sujeción neumática y un dispositivo de apertura/cierre neumático. 2. Estructura de marco: Todo el marco está hecho de perfiles de aluminio. Tiene una estructura sólida, asegurando un proceso de agarre estable y confiable. 3. Dientes de agarre ajustables: Los dientes de agarre a ambos lados de la pinza se pueden ajustar manualmente. Este ajuste puede cumplir con los requisitos de diferentes bolsas de especificación. 4. Agarra el material de los dientes y el espacio: Los dientes de agarre están hechos de aleación de aluminio. El espaciado de los dientes de agarre es consistente con la distancia central del rodillo de la máquina de código. |
|
|
|
|

| Estructura de pinza | Claw Tipo de dedo Special Bag Admite |
| Método de conexión con robot | Conexión de brida |
| Capacería del dispositivo de sujeción (mm) | 150 |
| Carrera del dispositivo de apertura/cierre (mm) | 200 |
| Método de conducción | Accionamiento de cilindro |
| Configuración de la marca de componentes neumáticos | Japón SMC |
| Especificaciones del producto aplicables | Basado en las especificaciones del producto proporcionadas por el cliente |

|
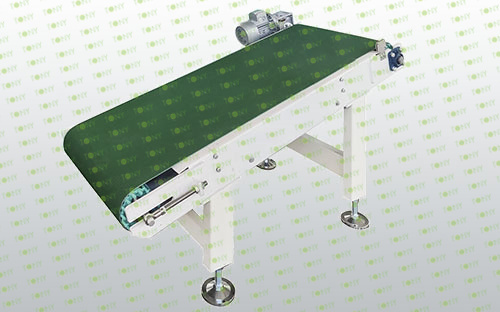
El transportador de cinta de escalada transporta materiales desde un lugar bajo hasta la altura requerida. Se compone principalmente de un marco, cinta transportadora, rodillos, rodillos, dispositivos de tensión, dispositivos de transmisión, etc. El marco está hecho de acero al carbono de alta calidad, con una superficie recubierta de pulverización, una estructura sólida y confiable, y un espesor de placa de 3.5-4 mm; Las placas de guía en ambos lados, la posición de las placas de guía se puede ajustar; Las correas de PVC de alta calidad se utilizan para el transporte suave; Impulsado por un conocido motor de marca nacional; Alrededor de L1600 × W650 (ancho efectivo) × H370 ~ H900, altura ajustable ± 50 mm; Se establece un dispositivo de posicionamiento de detección fotoeléctrica al final del transportador; Interruptor de detección fotoeléctrica: Omron o marca equivalente El motor debe cubrirse con una cubierta protectora, que debe ser resistente a la corrosión para evitar que el material corroice el motor |
||||||||||||||||||||||
| Configuración relacionada | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
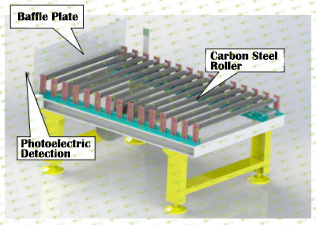
El transportador de rodillos que espera código se usa para localizar y detectar la bolsa del material antes de agarrar, y proporcionar la señal en posición al robot para agarrar. La estructura principal y los parámetros son los siguientes: El marco está hecho de perfiles de acero al carbono, la estructura es firme y confiable, y el grosor de la placa es de 3-4 mm; El rodillo está hecho de rodillo de acero de carbono de la rueda dentada; Está impulsado por un conocido motor de marca nacional; La altura de transmisión es ajustable de 900 ± 50 mm; Las dimensiones generales del transportador son aproximadamente L1040 × W650 mm (ancho efectivo); Se establece un dispositivo de detección fotoeléctrica en el final del transportador; Interruptor de detección fotoeléctrica: Omron o marca equivalente El motor debe cubrirse con una cubierta protectora, que debe ser resistente a la corrosión para evitar que el material corroice el motor |
||||||||||||||||
| Configuración relacionada | ||||||||||||||||
 |
|
|||||||||||||||

|
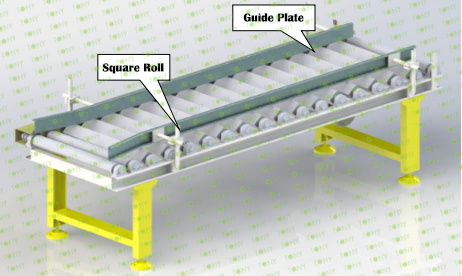
El transportador de formas de rodillo cuadrado utiliza la vibración generada por el rodillo cuadrado para distribuir uniformemente el material en la bolsa y hacer que la bolsa plana en su conjunto. La estructura principal y los parámetros son los siguientes: El marco está hecho de acero, la estructura es firme y confiable, y el grosor de la placa es de 3-4 mm; Las placas de guía en ambos lados están hechas de acero al carbono, y la posición de las placas de guía es ajustable; Los rodillos transportadores están hechos de rodillos de acero al carbono con una superficie lisa; Está impulsado por un conocido motor de marca nacional; La altura de transmisión es ajustable de 900 ± 50 mm; Las dimensiones generales del transportador de configuración son aproximadamente L2000 × W650 mm (ancho efectivo del rodillo); Se establece un dispositivo de posicionamiento de detección fotoeléctrica al final del transportador; Interruptor de detección fotoeléctrica: Omron o marca equivalente El motor debe cubrirse con una cubierta protectora, que debe ser resistente a la corrosión para evitar que el material corroiga el motor. Apariencia de la máquina de formación de rodillos cuadrados |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. Fuente de alimentación (línea de producción única) Voltaje de la fuente de alimentación: AC380V ± 10% 50Hz Fuente de alimentación de control: DC24V Consumo de energía: ~ 8kw |
2. Suministro de aire (línea de producción única) Aire de instrumento estándar Presión: 0.4 ~ 0.6MPA Consumo de aire: 3 ~ 5 nm3/h |
|
3. Medio ambiente Temperatura: -10 ~+50 ℃ Humedad: ≤90% (sin condensación) |
4. Piso Espesor: ≥18 cm de concreto estándar |


|
24 horas de servicio en línea. -La incrustación se responderá dentro de las 2 horas. -Tal-the-the-theway Servicio de seguimiento ofrecido desde el pedido de la entrega hasta la entrega. -Capacitación libre de operación, depuración y mantenimiento diario. -Se podemos proporcionar una instalación de guía profesional. -Ente un año de garantía y servicio postventa general. -Los de diseño y diagrama de flujo están disponibles para nuestros clientes. -Engente de equipo de I + D independiente y sistema de gestión estricta y científica |
 |





2025 Tony Machinery - Todos los derechos reservados. Mapa