
 |
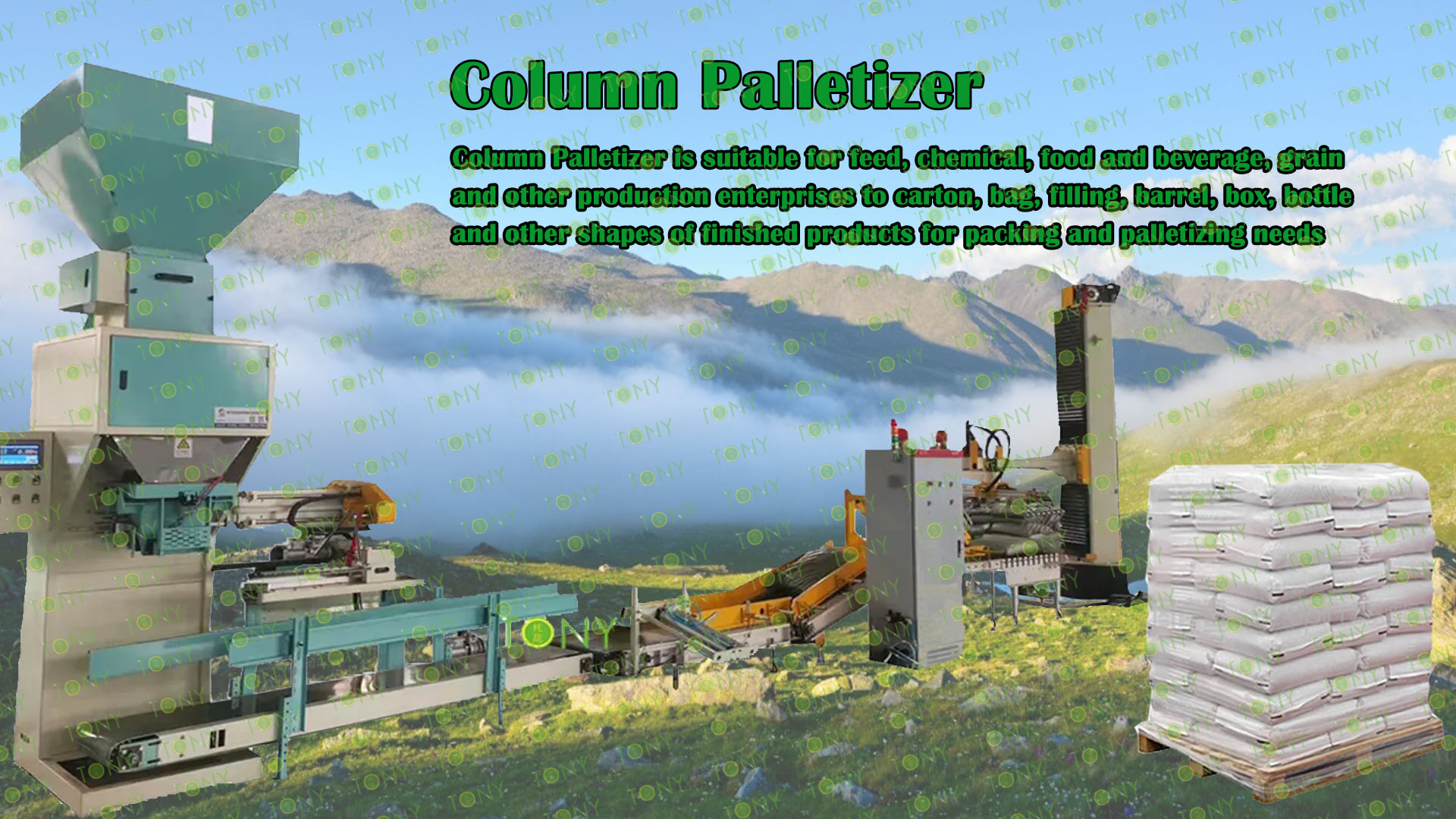
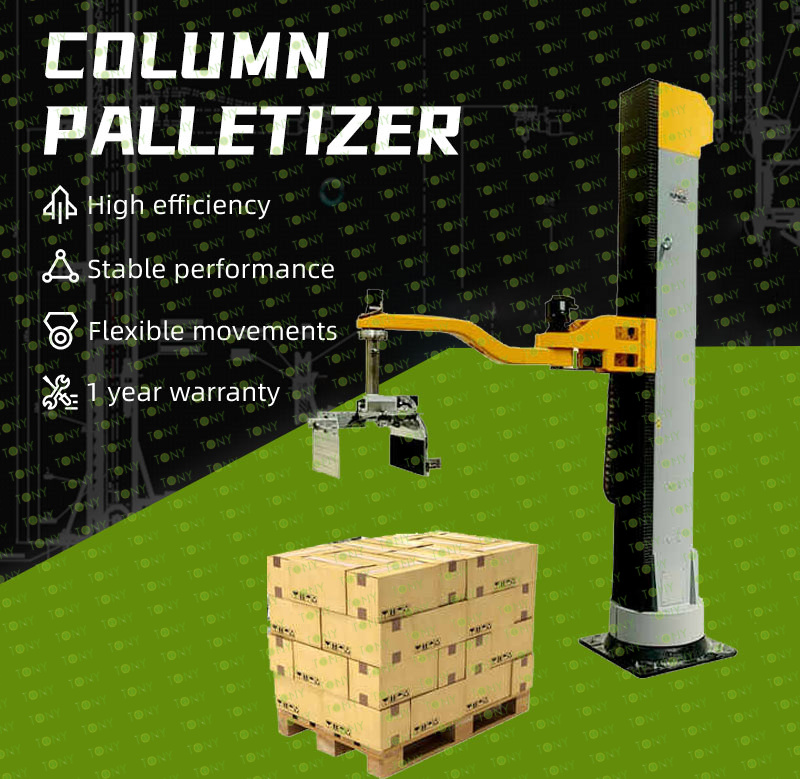
I robot di colonna della serie Tony hanno attuatori lineari unici, progetti di braccio per risparmiare energia e ecologici, interfacce operative semplici e pinze personalizzate. Possono fornire soluzioni robot professionali personalizzate per diverse linee di produzione e materiali. La loro eccellente precisione e velocità, prestazioni efficienti e stabili consentono a un robot di completare i requisiti di pallettizzazione di più linee di produzione contemporaneamente. Il robot ha una capacità di carico di 50 kg-80 kg ed è adatto per mangimi, sostanze chimiche, cereali e petrolio, cibo, materiali da costruzione, sostanze chimiche quotidiane, alcol, bevande, medicine, elettrodomestici, elettronica 3C e altre industrie. |

|
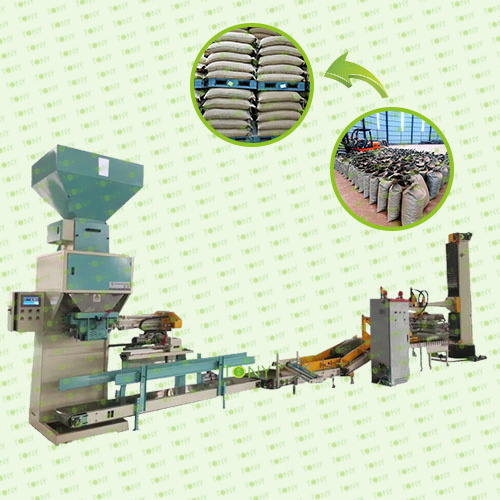
Il palletier della colonna realizza l'interpolazione lineare punto a - punto attraverso il sistema di controllo del robot, rendendo il movimento liscio e fluente. Il suo principio di lavoro è il seguente: 1. Trasporto e posizionamento del Materiale: i materiali confezionati vengono trasportati nell'area pallettizzazione designata attraverso il trasportatore. Questi materiali vengono quindi posizionati. 2. Posizionamento del dispositivo: il robot sposta l'apparecchio sulla parte superiore del posizionamento del materiale attraverso la coordinazione di ciascun asse. 3. Prelievo del materiale: quando viene emesso il segnale di posizionamento del materiale, l'apparecchiatura si sposta verso il basso attraverso il servo controllo del motore. Quindi raccoglie il materiale. 4. Trasporto e posizionamento del materiale: dopo aver raccolto il materiale, l'apparecchiatura lo trasporta nella parte superiore della posizione pallettizzazione. Ciò consente al materiale di raggiungere il punto di posizionamento. Successivamente, il materiale viene impilato nella posizione designata. 5. Operazione ripetuta: ripetere le azioni di cui sopra fino al completamento dell'intero pallet. |
 |

 |
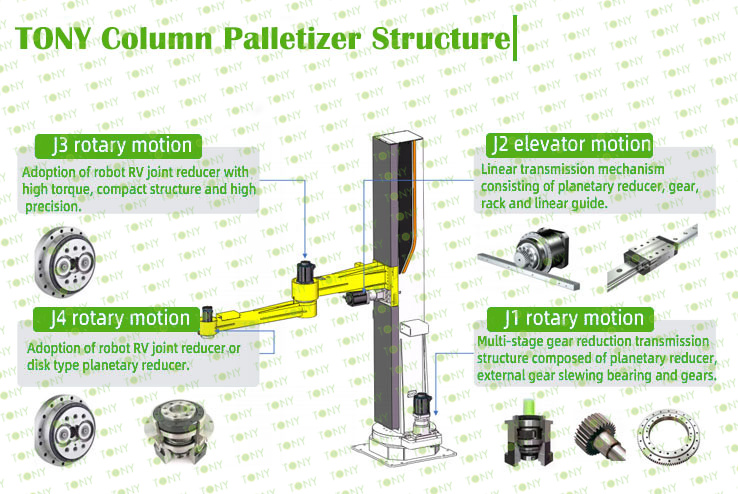
1. Attuatore lineare unico: L'intelligente meccanismo articolare a quattro assi rende il programma di movimento robot più semplice e il controllo più preciso. 2. Design del braccio robotico per risparmiare energia e rispettosi dell'ambiente: La produzione ad alta resistenza e ragionevole non solo rende il movimento del braccio più flessibile, ma riduce anche la perdita di energia. 3. Interfaccia di operazione grafica semplice e interfaccia di operazione grafica:Esistono poche posizioni di insegnamento e l'interfaccia operativa è semplice, rendendo più facile il debug in loco e migliorando notevolmente l'efficienza in loco. 4. Monitoraggio in loco in tempo reale: Il software di simulazione di movimento in loco ad alta precisione può comprendere a distanza se il programma in loco funziona normalmente e monitorare automaticamente l'interferenza per evitare collisioni di interferenza. 5. Simulazione in loco pre-layout: Utilizzando un potente software di simulazione/di programmazione 3D, è possibile completare facilmente la programmazione robot, il layout, il monitoraggio delle interferenze, la simulazione del movimento in loco e altre serie di lavori in ufficio, che diventano semplici ed efficaci, riducendo così notevolmente il tempo di debuging in loco e migliorando l'efficienza della produzione complessiva. |


|
1 |
Capacità di pallettizzazione |
350-400 volte/ora |
|
2 |
Strati palletizzanti |
5-10 strati |
|
3 |
Altezza massima di impilamento |
1,9 metri |
|
4 |
Archiviazione del programma Unlimited |
Illimitato |
|
5 |
Tempo di lavoro palletizzato |
24 ore di funzionamento continuo |
|
6 |
Ambiente palletizzazione |
Incontra l'ambiente di produzione dell'acquirente |

 |
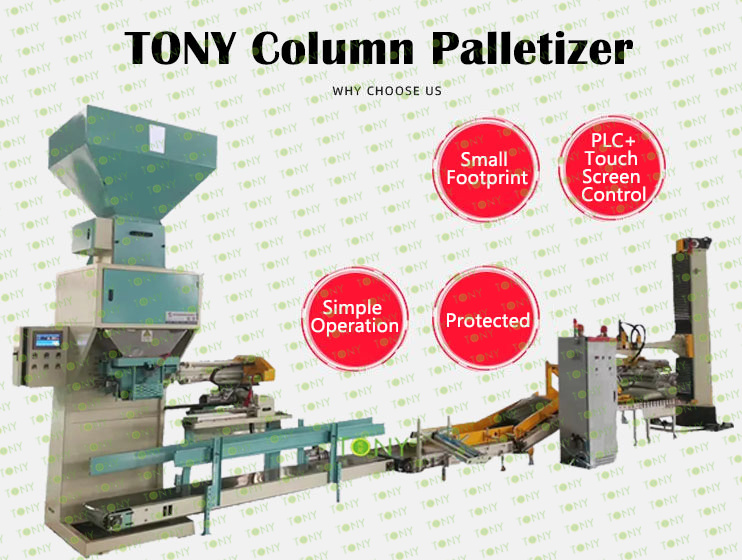
Forte capacità di lavoro continuo: il palletizzatore verticale può funzionare continuamente per 8 ore e può sostituire 3-4 lavoratori, risparmiando così i costi del lavoro. Forte applicabilità: Il palletizzatore verticale è adatto a una varietà di scenari e può essere utilizzato per le operazioni pallettizzanti su più linee di produzione. Ha una piccola struttura e occupa una piccola area. Elevata precisione operativa: Il palletizzatore verticale controlla il movimento della pinza attraverso un programma e il pallet impilato è fermo e non crollerà, il che è favorevole alla gestione del trasporto e dello stoccaggio del prodotto. Alto grado di automazione: Il palletizzatore verticale adotta un servo azionamento, con un movimento accurato, una precisione operativa elevata, un ampio intervallo di lavoro e un sistema di controllo indipendente per garantire l'accuratezza del funzionamento. Performance ad alto costo: Il pallettizzatore verticale è conveniente, solo un terzo del robot pallettizzazione e ha un basso costo di applicazione completo, bassi costi di manutenzione e basso tasso di fallimento. Struttura semplice: Il palletizzatore verticale ha una struttura semplice ed è facile da mantenere. Deve solo lubrificare regolarmente i cuscinetti, il che riduce i costi di manutenzione. Durata di lunga durata: A causa della sua struttura meccanica, il palletizzatore verticale ha una durata di lunga durata e sostanzialmente non richiede una manutenzione complicata. |

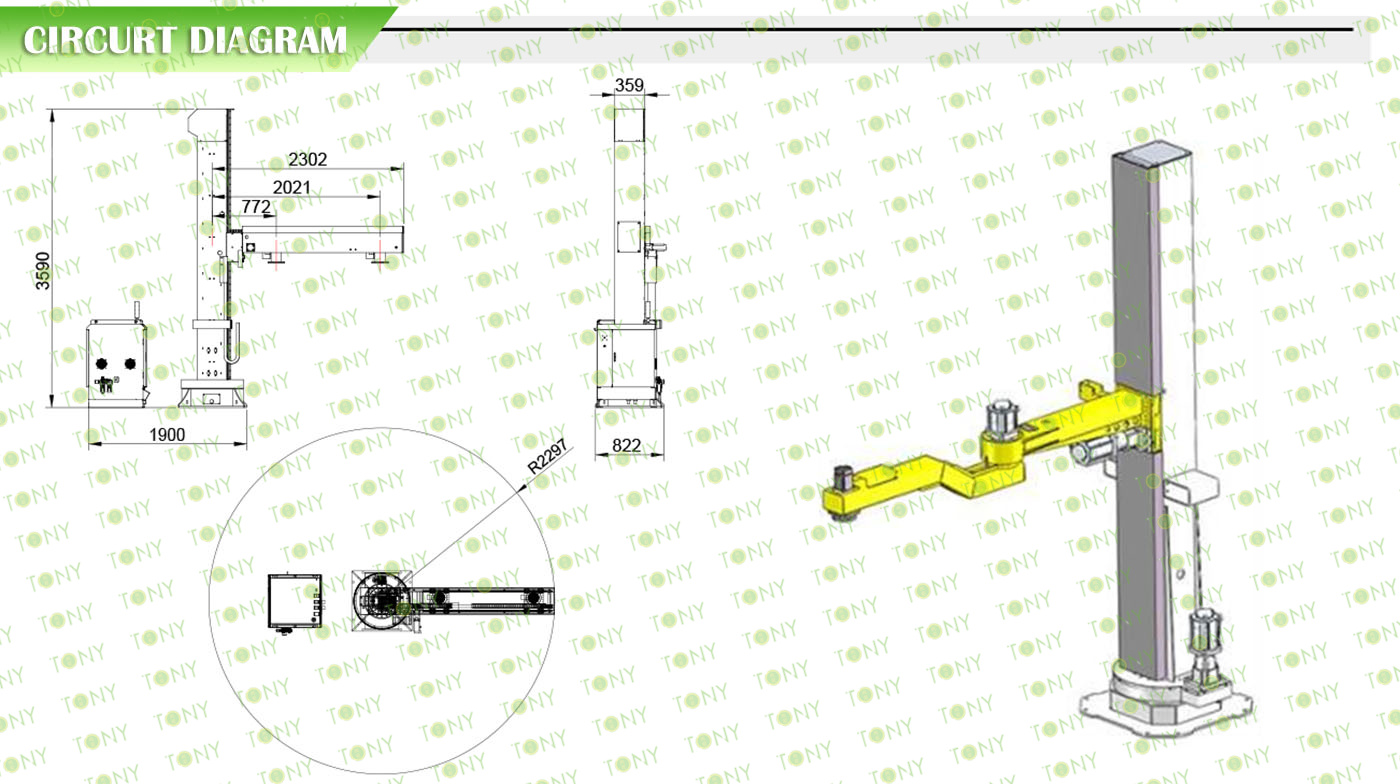
| Raggio di movimento | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900mm | |
| J4 | ±240° | |
| Carico massimo | 120 kg | |
| Capacità funzionante | 350-400pacchetti | |
| Alimentazione elettrica | 380V 50Hztrifase a quattro fili | |
| Potenza operativa | 5.7kw | |
| Dimensione dell'unità principale | L3090mm×W1000mm×H3360mm(nuovo modello) | |
| Altezza di impilamento | 1900mm | |
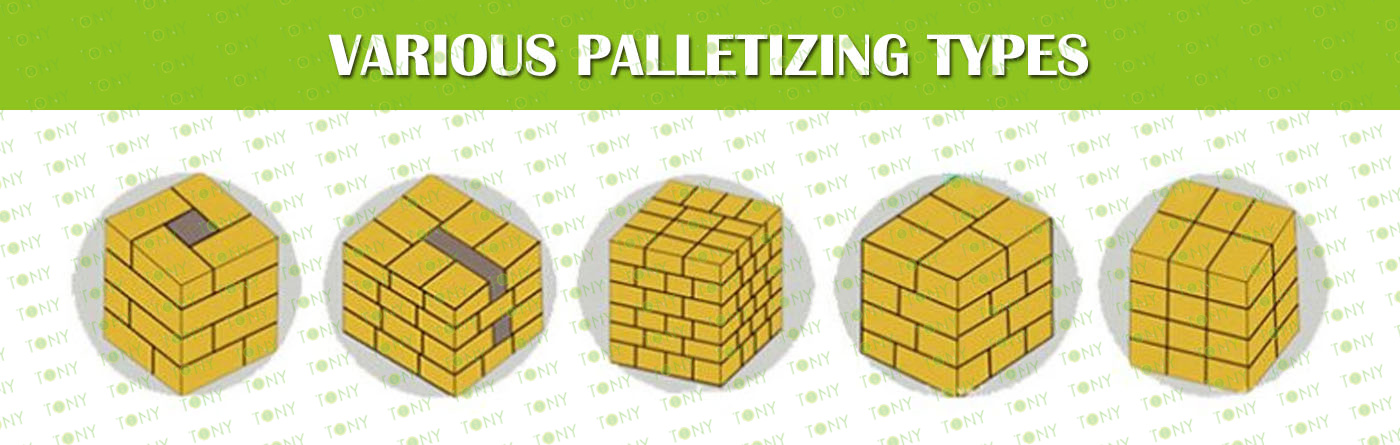
| Forma di impilamento | Five-Flowed, sei fiori, ecc. | |
| Pressione di alimentazione dell'aria | 0,6-0,8 mA | |
| Peso dell'attrezzatura | 1400 kg | |
| Nome e modello di palletizer | GJ-LZ400 |
| Freedom of Motion (Asse) | 4 |
| Capacità di carico massima (kg) | 80 |
| Ripetere l'accuratezza del posizionamento (mm) | ±1 mm |
| Modalità di unità | Servo Drive |
| Vettore | MORSETTO |
| Memoria pallettizzazione | Memoria intelligente |
| Copertura massima (mm) | 2350 |
| Copertura massima (mm) | 925 |

|
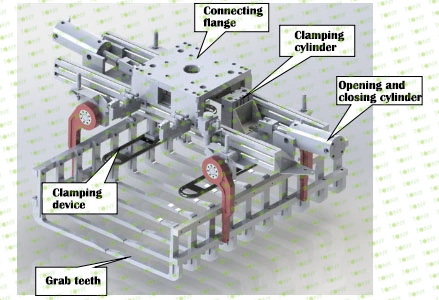
1. PinzaTipo e dispositivi: Adotta una pinza per borsa speciale di tipo artiglio. È dotato di un dispositivo di serraggio pneumatico e un dispositivo pneumatico di apertura/chiusura. 2. Struttura del telaio: L'intero telaio è realizzato con profili di alluminio. Ha una struttura solida, garantendo un processo di presa stabile e affidabile. 3. Denti regolabili con i denti: I denti di presa su entrambi i lati della pinza possono essere regolati manualmente. Questa regolazione può soddisfare i requisiti di sacchetti di specifica diversi. 4. Prendi il materiale e la spaziatura dei denti: I denti Grab sono realizzati in lega di alluminio. La spaziatura dei denti è coerente con la distanza centrale del rullo della macchina del codice. |
|
|
|
|

| Struttura della pinza | Tipo di dito artiglio pinza per borsa speciale |
| Metodo di connessione con il robot | Connessione flangia |
| Scatta del dispositivo di bloccaggio (mm) | 150 |
| Scatta del dispositivo di apertura/chiusura (MM) | 200 |
| Metodo di guida | Cilindro Drive |
| Configurazione del marchio componente pneumatico | Giappone SMC |
| Specifiche del prodotto applicabili | Sulla base delle specifiche del prodotto fornite dal cliente |

|
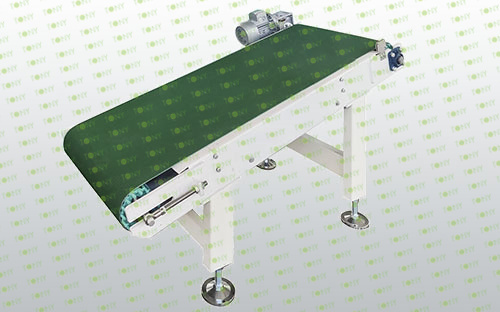
Il trasportatore della cintura di arrampicata trasporta materiali da un punto basso all'altezza richiesta. È composto principalmente da un telaio, nastro trasportatore, rulli, rulli, dispositivi di tensionamento, dispositivi di trasmissione, ecc. Il telaio è realizzato in acciaio al carbonio di alta qualità, con una superficie rivestita a spruzzo, una struttura solida e affidabile e uno spessore della piastra di 3,5-4 mm; Le piastre guida su entrambi i lati, la posizione delle piastre guida può essere regolata; Le cinture in PVC di alta qualità vengono utilizzate per il trasporto regolare; Spinto da un noto motore a marchio domestico; Circa L1600 × W650 (larghezza effettiva) × H370 ~ H900, altezza regolabile ± 50 mm; Un dispositivo di posizionamento del rilevamento fotoelettrico è impostato alla fine del trasportatore; Interruttore di rilevamento fotoelettrico: OMRON o marchio equivalente Il motore deve essere coperto da una copertura protettiva, che deve essere resistente alla corrosione per impedire al materiale di corrosire del motore |
||||||||||||||||||||||
| Configurazione correlata | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
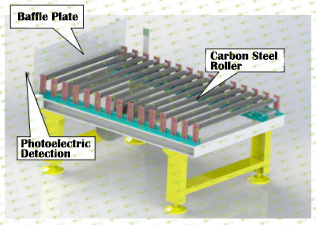
Il trasportatore a rulli in attesa di codice viene utilizzato per individuare e rilevare la borsa del materiale prima di afferrare e fornire il segnale in posizione al robot per afferrare. La struttura e i parametri principali sono i seguenti: Il telaio è realizzato in profili di acciaio al carbonio, la struttura è solida e affidabile e lo spessore della piastra è di 3-4 mm; Il rullo è realizzato in rullo in acciaio a pignone; È guidato da un noto motore a marchio domestico; L'altezza di trasporto è regolabile 900 ± 50 mm; Le dimensioni complessive del trasportatore sono circa L1040 × W650mm (larghezza effettiva); Un dispositivo di rilevamento fotoelettrico è impostato alla fine del trasportatore; Interruttore di rilevamento fotoelettrico: OMRON o marchio equivalente Il motore deve essere coperto da una copertura protettiva, che deve essere resistente alla corrosione per impedire al materiale di corrosire del motore |
||||||||||||||||
| Configurazione correlata | ||||||||||||||||
 |
|
|||||||||||||||

|
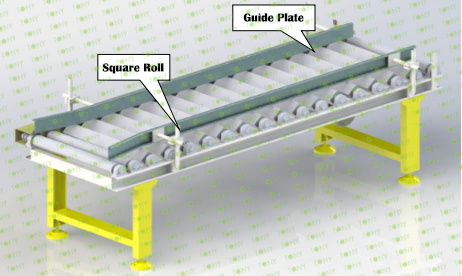
Il trasportatore a forma di rullo quadrato utilizza la vibrazione generata dal rullo quadrato per distribuire uniformemente il materiale nella borsa e rendere la borsa piatta nel suo insieme. La struttura e i parametri principali sono i seguenti: Il telaio è realizzato in acciaio, la struttura è solida e affidabile e lo spessore della piastra è di 3-4 mm; Le piastre di guida su entrambi i lati sono realizzate in acciaio al carbonio e la posizione delle piastre di guida è regolabile; I rulli del trasportatore sono realizzati con rulli in acciaio al carbonio con una superficie liscia; È guidato da un noto motore a marchio domestico; L'altezza di trasporto è regolabile 900 ± 50 mm; Le dimensioni complessive del trasportatore di forma sono circa L2000 × W650mm (larghezza effettiva del rullo); Un dispositivo di posizionamento del rilevamento fotoelettrico è impostato alla fine del trasportatore; Interruttore di rilevamento fotoelettrico: OMRON o marchio equivalente Il motore deve essere coperto da una copertura protettiva, che deve essere resistente alla corrosione per impedire al materiale di corrosire del motore. Aspetto della macchina a forma di rulli quadrati |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. Alimentazione (linea di produzione singola) Tensione dell'alimentazione: AC380V ± 10% 50Hz Alimentazione di controllo: DC24V Consumo energetico: ~ 8KW |
2. ARIA PROPRIETÀ (linea di produzione singola) Aria dello strumento standard Pressione: 0,4 ~ 0,6 MPA Consumo d'aria: 3 ~ 5 nm3/h |
|
3. Ambiente Temperatura: -10 ~+50 ℃ Umidità: ≤90% (nessuna condensa) |
4. Piano Spessore: calcestruzzo standard ≥18 cm |


|
Servizio online 24 ore. -Inquiry verrà risposto entro 2 ore. -All Servizio di tracciamento offerto dal posizionamento dell'ordine alla consegna. -A formazione gratuita per il funzionamento, il debug e la manutenzione giornaliera. -Che possiamo fornire l'installazione della guida professionale. -Una anno di garanzia e servizio post-vendita a tutto tondo. -Il grafico a flusso di progettazione e flusso sono disponibili per i nostri clienti. -Team indipendente da R&D e sistema di gestione rigoroso e scientifico |
 |





2025 Tony Machinery - Tutti i diritti riservati. Mappa