
 |
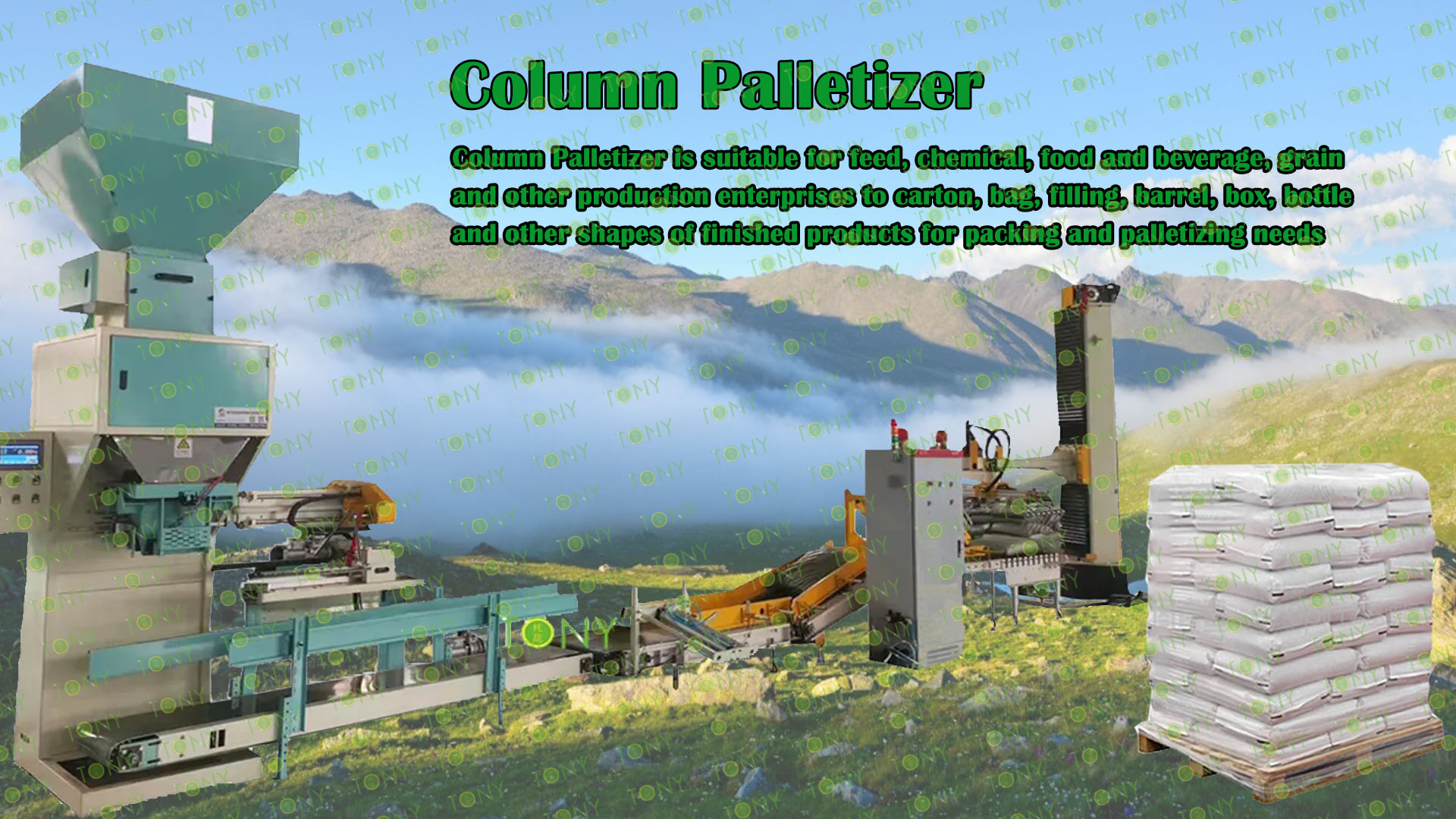
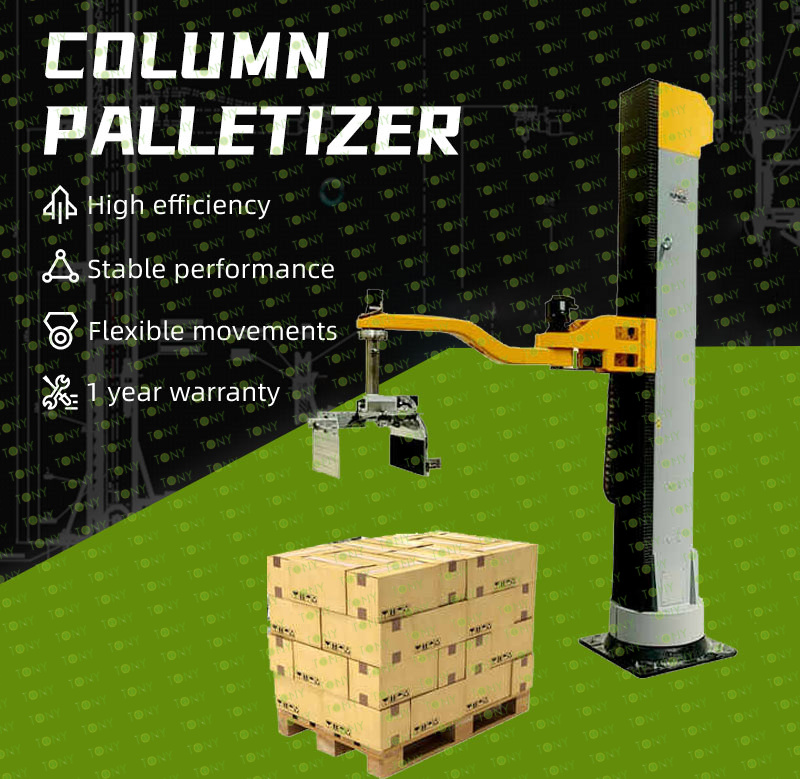
Les robots de colonne de la série Tony ont des actionneurs linéaires uniques, des conceptions d'économie d'énergie et des bras respectueux de l'environnement, des interfaces de fonctionnement simples et des pinces personnalisées. Ils peuvent fournir des solutions de robot professionnelles personnalisées pour différentes lignes de production et matériaux. Leur excellente précision et vitesse, les performances efficaces et stables permettent à un robot de remplir les exigences de palettisation de plusieurs lignes de production en même temps. Le robot a une capacité de charge de 50 kg-80 kg et convient aux aliments, chimiques, aux céréales et aux aliments, à la nourriture, aux matériaux de construction, aux produits chimiques quotidiens, à l'alcool, aux boissons, aux médicaments, aux appareils électroménagers, à l'électronique 3C et à d'autres industries. |

|
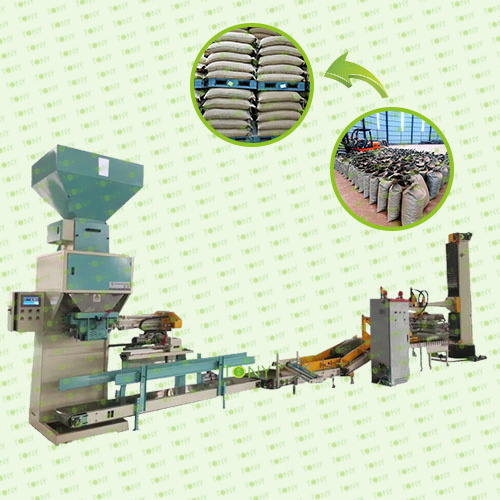
Le palette de colonne réalise l'interpolation linéaire point - vers le point à travers le système de contrôle du robot, ce qui rend le mouvement lisse et fluide. Son principe de travail est le suivant: 1. Transport et positionnement du matériel: Les matériaux emballés sont transportés vers la zone de palettisation désignée par le convoyeur. Ces matériaux sont ensuite positionnés. 2. Positionnement du luminaire: Le robot déplace le luminaire vers le haut du positionnement du matériau à travers la coordination de chaque axe. 3. Cueillette de support: Lorsque le signal de positionnement du matériau est émis, le luminaire se déplace vers le bas à travers la commande du servomoteur. Il ramasse ensuite le matériau. 4. Transport et placement des matériaux: Après avoir ramassé le matériau, le luminaire le transporte vers le haut de la position de palettisation. Cela permet au matériau d'atteindre le point de placement. Par la suite, le matériau est empilé dans la position désignée. 5. Fonctionnement répété: Répétez les actions ci-dessus jusqu'à ce que la palette entière soit terminée. |
 |

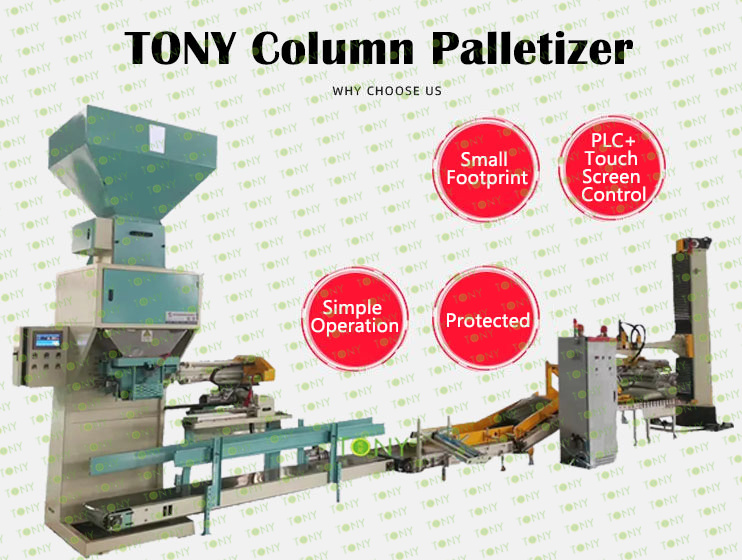 |
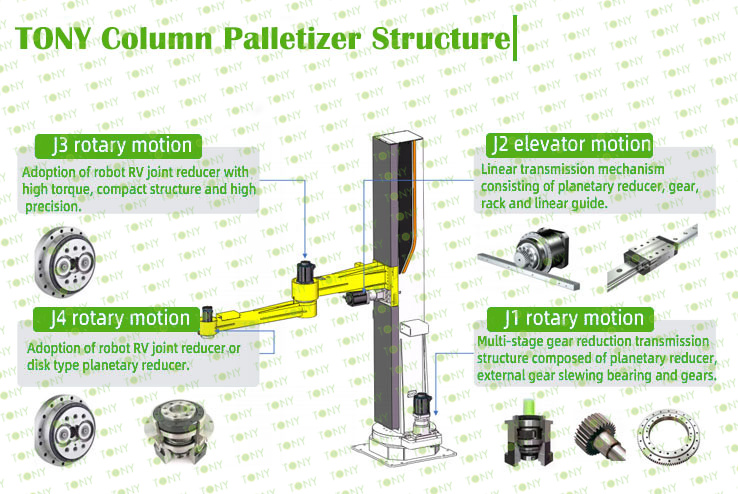
1. Actionneur linéaire unique: Le mécanisme conjoint à quatre axes intelligent rend le programme de mouvement du robot plus simple et le contrôle plus précis. 2. Conception d'énergie et de bras de robot d'énergie: La production élevée et raisonnable rend non seulement le mouvement du bras plus flexible, mais réduit également la perte d'énergie. 3. Fonctionnement d'enseignement simple et interface de fonctionnement graphique amicale:Il y a peu de postes d'enseignement et l'interface d'opération est simple, ce qui facilite le débogage sur place et améliore considérablement l'efficacité sur place. 4. Surveillance sur place en temps réel: Le logiciel de simulation de mouvement sur place de haute précision peut comprendre à distance si le programme sur site fonctionne normalement et surveiller automatiquement les interférences pour éviter les collisions d'interférence. 5. Simulation pré-location sur place: En utilisant un puissant logiciel de simulation / programmation 3D, vous pouvez facilement terminer la programmation robotique, la mise en page, la surveillance des interférences, la simulation de mouvement sur place et d'autres séries de travaux au bureau, qui devient simple et efficace, réduisant ainsi considérablement le temps de débogage sur place et améliorant l'efficacité globale de la production. |


|
1 |
Capacité de palettisation |
350-400 fois / heure |
|
2 |
Couches de palettisation |
5 à 10 couches |
|
3 |
Hauteur d'empilement maximale |
1,9 mètres |
|
4 |
Storage de programme illimité |
Illimité |
|
5 |
Temps de travail de palettisation |
Fonctionnement continu 24 heures |
|
6 |
Environnement de palettisation |
Rencontrez l'environnement de production de l'acheteur |

 |
Capacité de travail continue forte: le palettiseur vertical peut fonctionner en continu pendant 8 heures et remplacer 3-4 travailleurs, économisant ainsi les coûts de main-d'œuvre. Applicabilité forte: Le palettiseur vertical convient à une variété de scénarios et peut être utilisé pour les opérations de palettisation sur plusieurs lignes de production. Il a une petite structure et occupe une petite zone. Précision élevée de fonctionnement: Le palettiseur vertical contrôle le mouvement de la pince à travers un programme, et la palette empilée est ferme et ne s'effondrera pas, ce qui est propice à la gestion du transport et du stockage du produit. Haut degré d'automatisation: Le palettiseur vertical adopte le service de servo complet, avec un mouvement précis, une précision de fonctionnement élevée, une grande plage de travail et un système de contrôle indépendant pour assurer la précision du fonctionnement. Performances à coût élevé: Le palettiseur vertical est abordable, seulement un tiers du robot de palettisation et a un faible coût d'application complet, un faible coût d'entretien et un faible taux de défaillance. Structure simple: Le palettiseur vertical a une structure simple et est facile à maintenir. Il n'a qu'à lubrifier régulièrement les roulements, ce qui réduit les coûts de maintenance. Longue durée de vie: En raison de sa structure mécanique, le palettiseur vertical a une longue durée de vie de service et ne nécessite pas un entretien compliqué. |

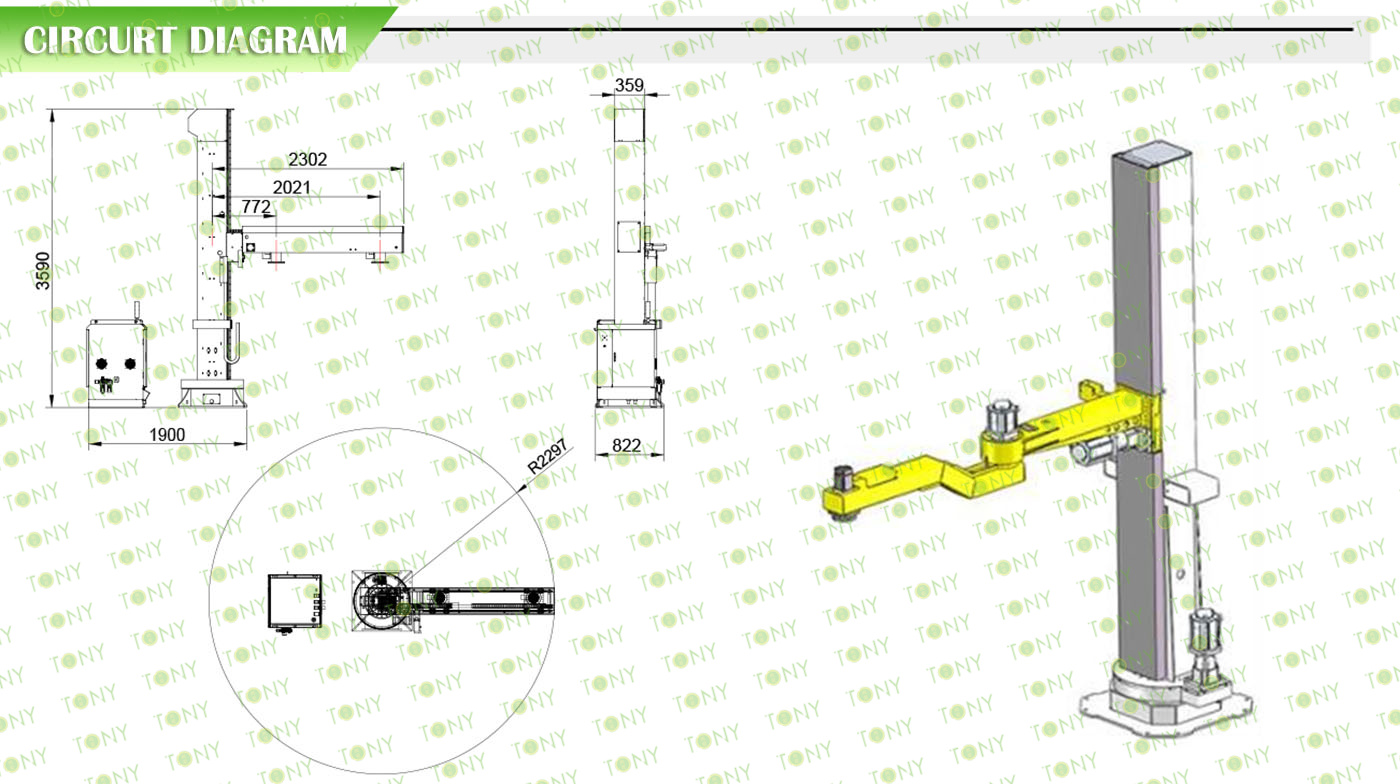
| Éventail | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900 mm | |
| J4 | ±240° | |
| Charge maximale | 120 kg | |
| Capacité de travail | 350-400packages | |
| Alimentation électrique | 380V 50HzQuatre triphasé à quatre phases | |
| Puissance de fonctionnement | 5,7 kW | |
| Taille de l'unité principale | L3090 mm×W1000 mm×H3360 mm(nouveau modèle) | |
| Hauteur d'empilement | 1900 mm | |
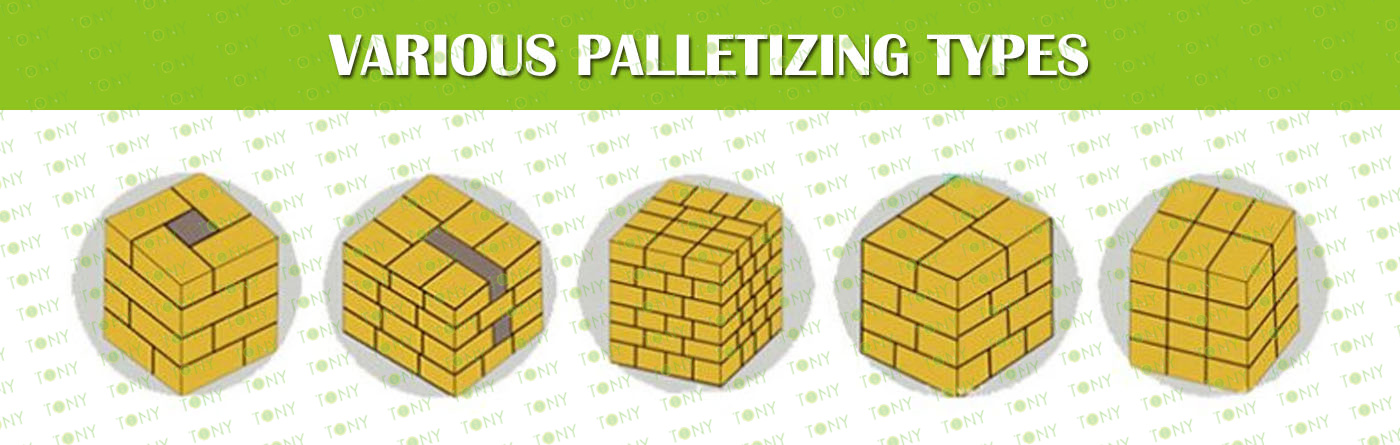
| Forme d'empilement | À cinq fleurs, à six fleurs, etc. | |
| Pression d'alimentation en air | 0,6-0,8 mA | |
| Poids de l'équipement | 1400 kg | |
| Nom et modèle du palette | GJ-LZ400 |
| Liberté de mouvement (axe) | 4 |
| Capacité de charge maximale (kg) | 80 |
| Répéter la précision du positionnement (mm) | ±1 mm |
| Mode d'entraînement | Servo |
| Transporteur | Serrer |
| Mémoire de palette | Mémoire intelligente |
| Couverture maximale (mm) | 2350 |
| Couverture maximale (mm) | 925 |

|
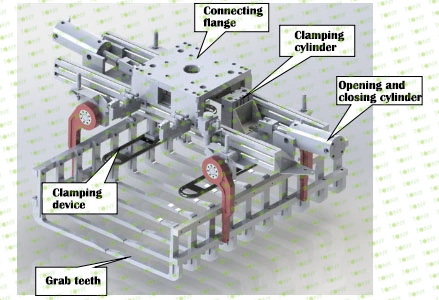
1. GripperType et appareils: Il adopte une grippe spéciale de type à griffe. Il est équipé d'un dispositif de serrage pneumatique et d'un dispositif d'ouverture / de fermeture pneumatique. 2. Structure du cadre: L'ensemble du cadre est fait de profils en aluminium. Il a une structure solide, assurant un processus de saisie stable et fiable. 3. Des dents de saisie réglables: Les dents de saisie des deux côtés de la pince peuvent être ajustées manuellement. Cet ajustement peut répondre aux exigences des sacs de spécifications différents. 4. Saisissez les dents du matériau et l'espacement: Les dents de saisie sont en alliage d'aluminium. L'espacement des dents de saisie est cohérent avec la distance centrale du rouleau de machine de code. |
|
|
|
|

| Structure de la pince | Grippe spécial de type doigt à griffes |
| Méthode de connexion avec le robot | Connexion à la bride |
| CROIS DE RESPORT (MM) | 150 |
| CRASSE DE DÉPIRES D'OUVERTURE / FROCKING (MM) | 200 |
| Méthode d'entraînement | Cylindre |
| Configuration de la marque des composants pneumatiques | Japon SMC |
| Spécifications de produit applicables | Sur la base des spécifications du produit fournies par le client |

|
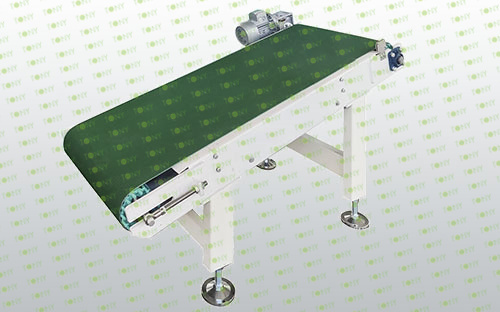
Le convoyeur à courroie d'escalade transporte les matériaux d'une place basse à la hauteur requise. Il est principalement composé d'un cadre, d'un tapis roulant, de rouleaux, de rouleaux, de dispositifs de tension, de dispositifs de transmission, etc. Le cadre est en acier au carbone de haute qualité, avec une surface enrobée par pulvérisation, une structure solide et fiable et une épaisseur de plaque de 3,5 à 4 mm; Plaques de guidage des deux côtés, la position des plaques de guidage peut être ajustée; Les ceintures en PVC de haute qualité sont utilisées pour le transport en douceur; Tiré par un moteur de marque domestique bien connu; Environ L1600 × W650 (largeur effective) × H370 ~ H900, réglable en hauteur ± 50 mm; Un dispositif de positionnement de détection photoélectrique est réglé à la fin du convoyeur; Interrupteur de détection photoélectrique: Omron ou marque équivalente Le moteur doit être couvert d'une couverture de protection, qui doit être résistante à la corrosion pour empêcher le matériau de corrodir le moteur |
||||||||||||||||||||||
| Configuration connexe | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
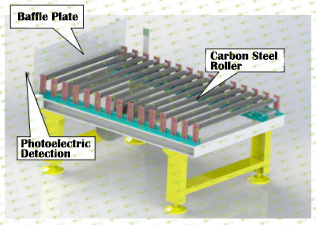
Le convoyeur à rouleaux d'attente de code est utilisé pour localiser et détecter le sac de matériau avant de saisir, et fournir le signal en position au robot pour saisir. La structure et les paramètres principaux sont les suivants: Le cadre est fait de profils en acier au carbone, la structure est ferme et fiable, et l'épaisseur de la plaque est de 3 à 4 mm; Le rouleau est en rouleau en acier en carbone à pignon; Il est motivé par un moteur de marque domestique bien connu; La hauteur de transport est réglable de 900 ± 50 mm; Les dimensions globales du convoyeur sont environ L1040 × W650 mm (largeur effective); Un dispositif en position de détection photoélectrique est réglé à la fin du convoyeur; Interrupteur de détection photoélectrique: Omron ou marque équivalente Le moteur doit être couvert d'une couverture de protection, qui doit être résistante à la corrosion pour empêcher le matériau de corrodir le moteur |
||||||||||||||||
| Configuration connexe | ||||||||||||||||
 |
|
|||||||||||||||

|
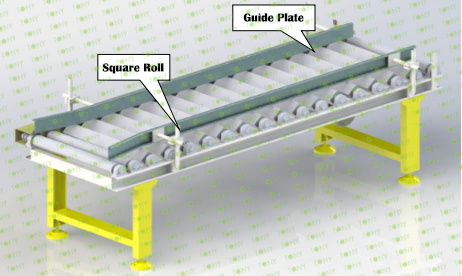
Le convoyeur en forme de rouleau carré utilise les vibrations générées par le rouleau carré pour distribuer uniformément le matériau dans le sac et rendre le sac à plat dans son ensemble. La structure et les paramètres principaux sont les suivants: Le cadre est en acier, la structure est ferme et fiable et l'épaisseur de la plaque est de 3 à 4 mm; Les plaques de guidage des deux côtés sont en acier au carbone et la position des plaques de guidage est réglable; Les rouleaux de convoyeur sont faits de rouleaux en acier en carbone avec une surface lisse; Il est motivé par un moteur de marque domestique bien connu; La hauteur de transport est réglable de 900 ± 50 mm; Les dimensions globales du convoyeur de mise en forme sont environ L2000 × W650 mm (largeur effective du rouleau); Un dispositif de positionnement de détection photoélectrique est réglé à la fin du convoyeur; Interrupteur de détection photoélectrique: Omron ou marque équivalente Le moteur doit être recouvert d'une couverture protectrice, qui doit être résistante à la corrosion pour empêcher le matériau de corrodir le moteur. Apparence de la machine de mise en forme du rouleau carré |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. Alimentation (ligne de production unique) Tension d'alimentation: AC380V ± 10% 50Hz Contrôle Alimentation: DC24V Consommation d'énergie: ~ 8kw |
2. Alimentation aérienne (ligne de production unique) Air d'instrument standard Pression: 0,4 ~ 0,6 MPA Consommation d'air: 3 ~ 5 nm3 / h |
|
3. Environnement Température: -10 ~ + 50 ℃ Humidité: ≤ 90% (pas de condensation) |
4. Floor Épaisseur: béton standard ≥ 18 cm |


|
Service en ligne de 24 heures. -Inquiry sera répondu dans les 2 heures. -Tous le service de suivi proposé de la commande de place à la livraison. -Les formation gratuite pour l'exploitation, le débogage et l'entretien quotidien. -Nous pouvons fournir une installation de guide professionnel. -Pe garantie d'une année et service après-vente après-vente. -La conception personnalisée et le tableau de flux sont disponibles pour nos clients. - Équipe de R&D indépendante et système de gestion stricte et scientifique |
 |





2025 Tony Machinery - Tous droits réservés. Carte