
 |
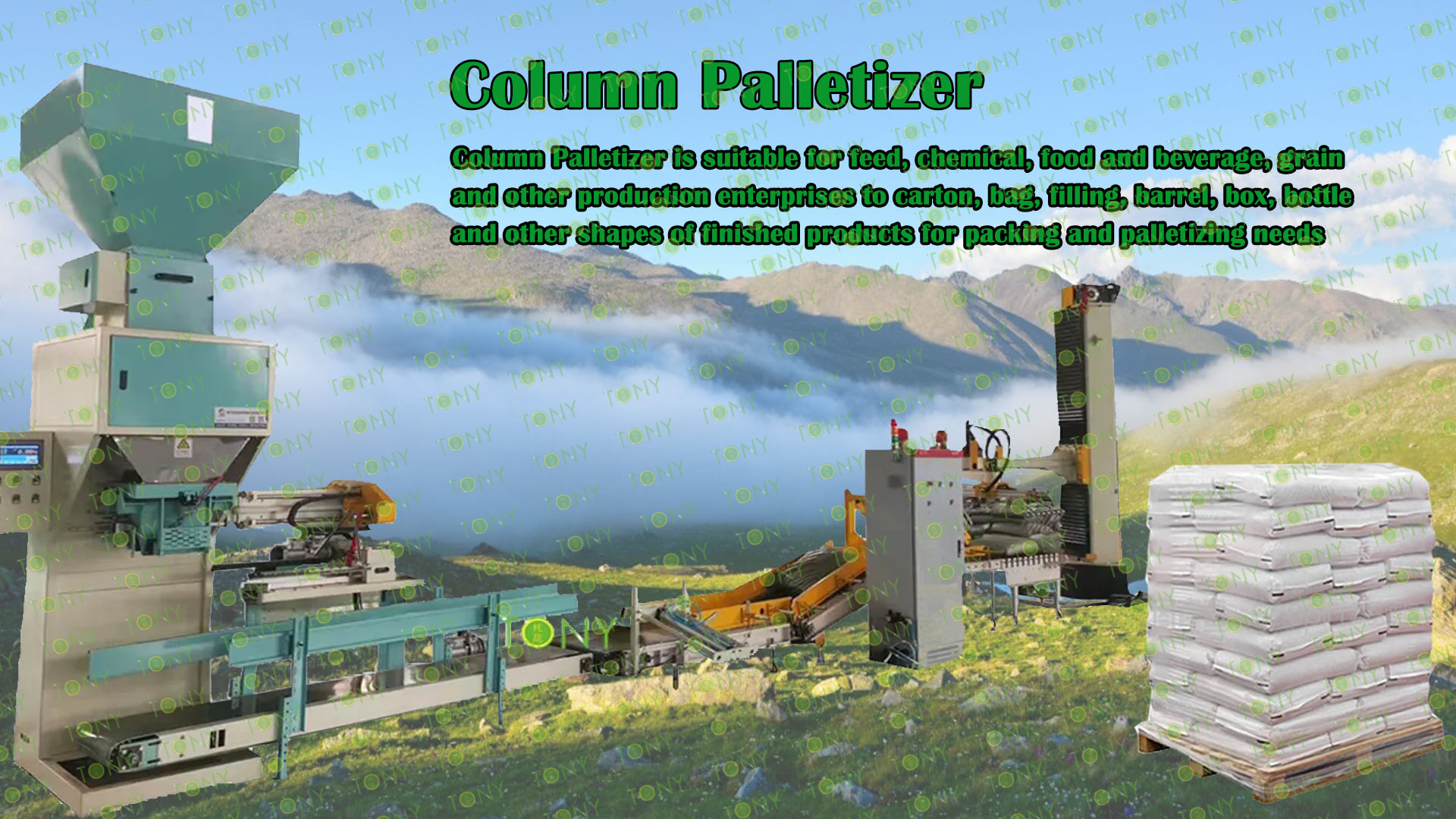
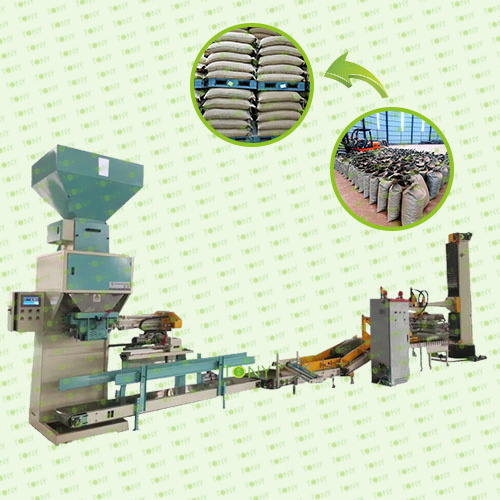
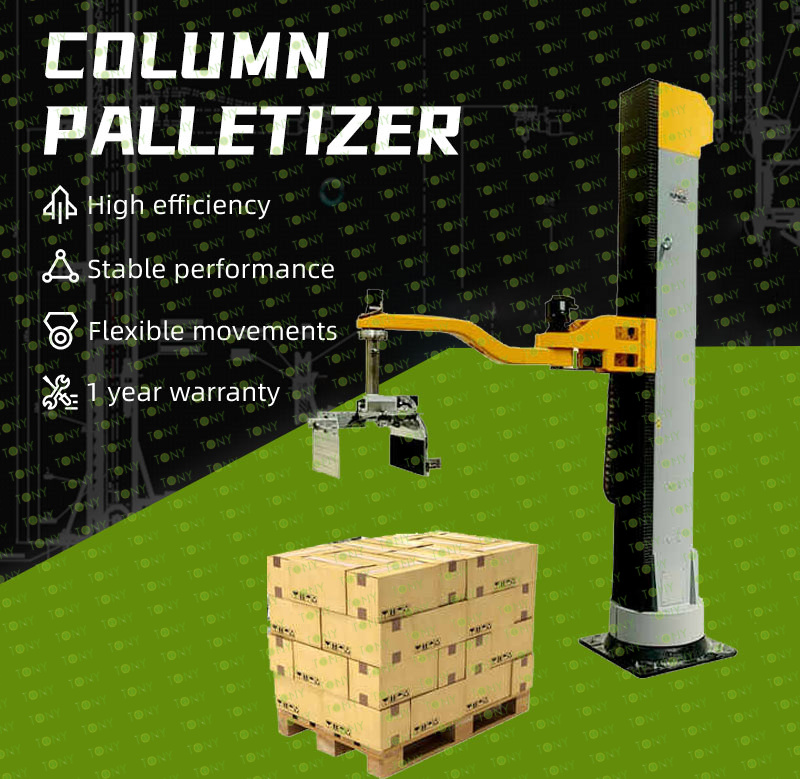
Die Tony Series-Säulenroboter verfügen über einzigartige lineare Aktuatoren, energiesparende und umweltfreundliche Armdesigns, einfache Betriebsoberflächen und maßgeschneiderte Greifer. Sie können maßgeschneiderte professionelle Roboterlösungen für verschiedene Produktionslinien und Materialien bereitstellen. Ihre hervorragende Präzision und Geschwindigkeit, effiziente und stabile Leistung ermöglicht es einem Roboter, die Palettierungsanforderungen mehrerer Produktionslinien gleichzeitig zu vervollständigen. Der Roboter hat eine Belastungskapazität von 50 kg-80 kg und ist für Futtermittel, Chemikalie, Getreide und Öl, Lebensmittel, Baumaterial, tägliche Chemikalien, Alkohol, Getränke, Medizin, Haushaltsgeräte, 3C-Elektronik und andere Branchen geeignet. |

|
Der Palletizer der Säule realisiert die lineare Interpolation von Punkten durch das Roboterkontrollsystem, wodurch die Bewegung glatt und fließend wird. Sein Arbeitsprinzip ist wie folgt: 1.Material Transport und Positionierung: Die verpackten Materialien werden durch den Förderer in den ausgewiesenen Palettierungsbereich transportiert. Diese Materialien werden dann positioniert. 2. Die Positionierung der Leuchte: Der Roboter bewegt die Fixture durch die Koordination jeder Achse auf die Oberseite der Materialpositionierung. 3. Materielles Ernte: Wenn das Materialpositionierungssignal ausgestellt wird, bewegt sich die Leuchte nach unten durch die Servo -Motorsteuerung. Es nimmt dann das Material auf. 4. Materialtransport und Platzierung: Nach dem Aufnehmen des Materials transportiert die Leuchte es an die Oberseite der Palettenposition. Dadurch kann das Material den Platzierungspunkt erreichen. Anschließend ist das Material in die angegebene Position gestapelt. 5. Operation: Wiederholen Sie die oben genannten Aktionen, bis die gesamte Palette abgeschlossen ist. |
 |

 |
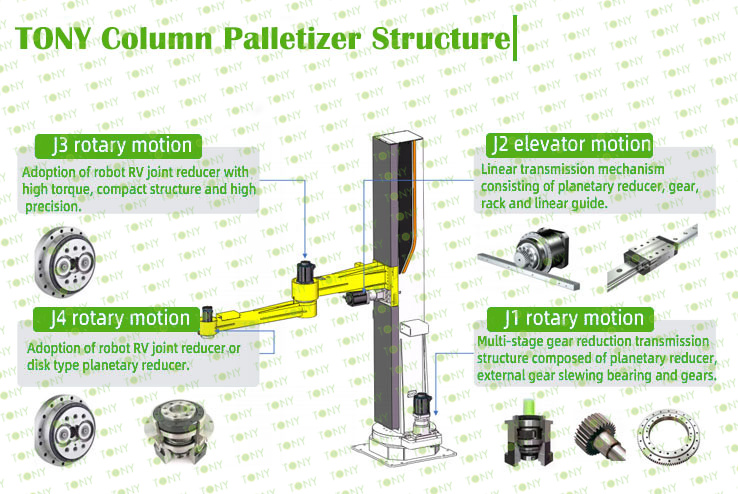
1. Einzigartiger linearer Aktuator: Der clevere gemeinsame Mechanismus mit vier Achsen macht das Roboterbewegungsprogramm einfacher und die Kontrolle genauer. 2. energiesparende und umweltfreundliche Roboterarmdesign: Die hochfeste und vernünftige Produktion macht die Armbewegung nicht nur flexibler, sondern reduziert auch den Energieverlust. 3. Einfacher Unterrichtsbetrieb und freundlicher grafischer Betriebsschnittstelle:Es gibt nur wenige Unterrichtspositionen und die Betriebsoberfläche ist einfach, wodurch das Debuggen vor Ort einfacher und die Effizienz vor Ort erheblich verbessert wird. 4. Überwachung in Echtzeit vor Ort: Hochvorbereitete Bewegungssimulationssoftware vor Ort kann aus der Ferne verstehen, ob das Vor-Ort-Programm normal funktioniert, und überwachen automatisch Interferenzen, um Interferenzkollisionen zu vermeiden. 5. Simulation vor der Lektion vor Ort: Mit leistungsstarken 3D-Simulation/Programmiersoftware können Sie Roboterprogrammierung, Layout, Interferenzüberwachung, Bewegungssimulation vor Ort und andere Arbeitsreihen im Büro einfach abschließen, was einfach und effektiv wird, wodurch die Debugg-Zeit vor Ort und die Verbesserung der Gesamtproduktionseffizienz erheblich reduziert wird. |


|
1 |
Palettierkapazität |
350-400 Mal/Stunde |
|
2 |
Palettierschichten |
5-10 Schichten |
|
3 |
Maximale Stapelhöhe |
1,9 Meter |
|
4 |
Programmspeicher unbegrenzt |
Unbegrenzt |
|
5 |
Palletisierung der Arbeitszeit |
24 Stunden kontinuierlicher Betrieb |
|
6 |
Palletisierungsumgebung |
Treffen Sie die Produktionsumgebung des Käufers |

 |
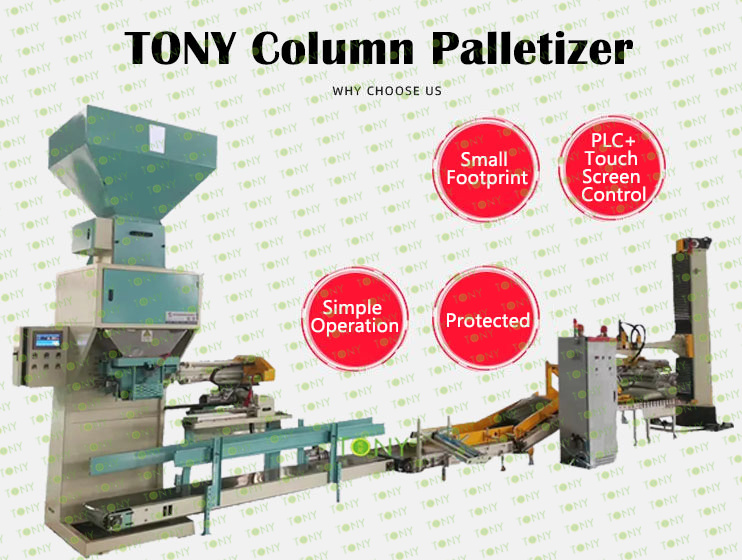
Starke kontinuierliche Arbeitsfähigkeit: Der vertikale Palletierer kann 8 Stunden lang kontinuierlich arbeiten und 3-4 Mitarbeiter ersetzen und so die Arbeitskosten einsparen. Starke Anwendbarkeit: Der vertikale Palettierer eignet sich für eine Vielzahl von Szenarien und kann zum Palettieren von Operationen auf mehreren Produktionslinien verwendet werden. Es hat eine kleine Struktur und nimmt einen kleinen Bereich ein. Hohe Betriebsgenauigkeit: Der vertikale Palletizer kontrolliert die Bewegung des Greifers durch ein Programm, und die gestapelte Palette ist fest und wird nicht zusammenbrechen, was dem Transport und der Lagerverwaltung des Produkts förderlich ist. Hoher Automatisierungsgrad: Der vertikale Palletierer nimmt einen vollständigen Servo -Antrieb mit genauer Bewegungen, hoher Betriebsgenauigkeit, großer Arbeitsbereich und einem unabhängigen Steuerungssystem an, um die Genauigkeit der Betriebsgenauigkeit sicherzustellen. Hohe Kostenleistung: Der vertikale Palettierer ist erschwinglich, nur ein Drittel des Palettierungsroboters und verfügt über niedrige umfassende Anwendungskosten, niedrige Wartungskosten und niedrige Ausfallrate. Einfache Struktur: Der vertikale Palletizer hat eine einfache Struktur und ist leicht zu warten. Es muss nur die Lager regelmäßig schmieren, was die Wartungskosten senkt. Langes Lebensdauer: Aufgrund seiner mechanischen Struktur hat der vertikale Palletierer eine lange Lebensdauer und erfordert im Grunde keine komplizierte Wartung. |

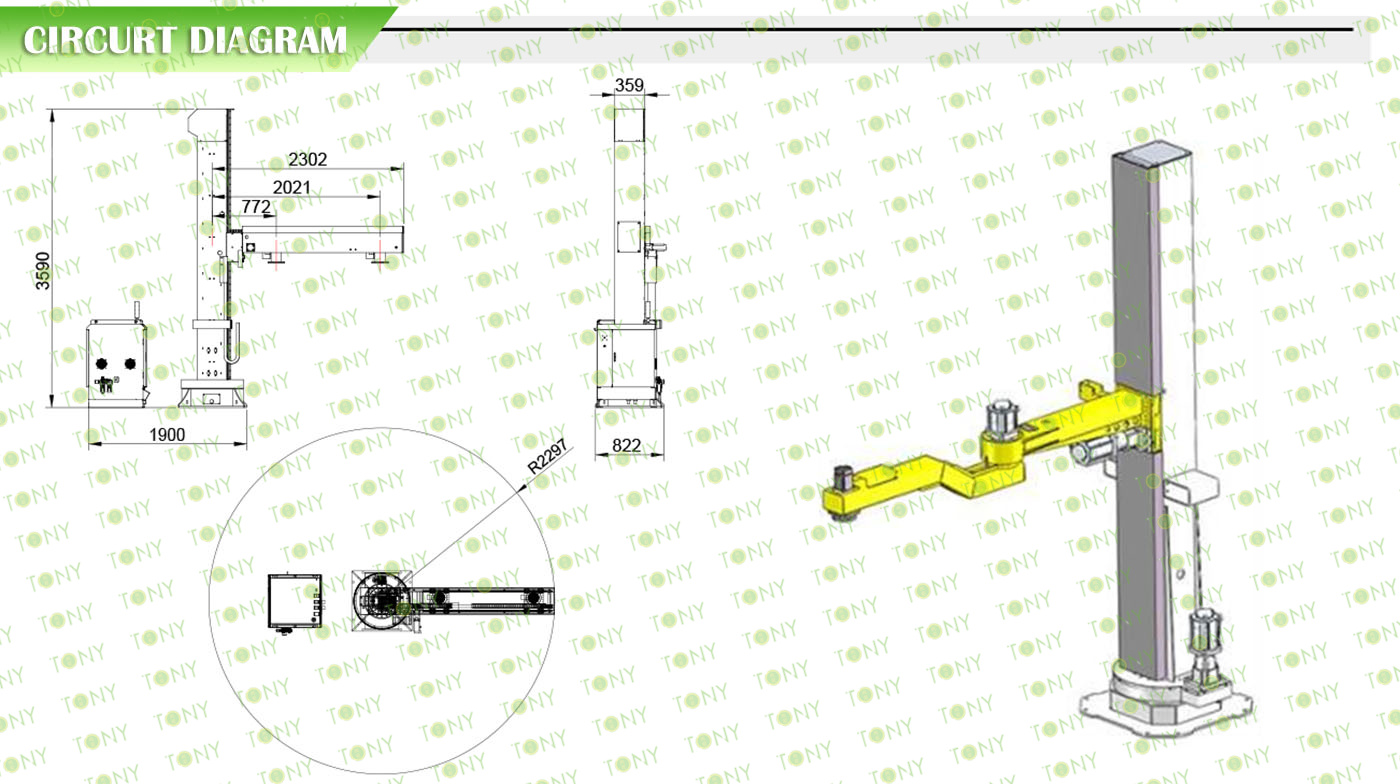
| Bewegungsbereich | J1 | ±170° |
| J2 | ±145° | |
| J3 | 1900 mm | |
| J4 | ±240° | |
| Maximale Last | 120 kg | |
| Arbeitskapazität | 350-400Pakete | |
| Stromversorgung | 380 V 50 HzDrei-Phasen-Vier-Draht | |
| Betriebsleistung | 5.7kW | |
| Haupteinheitengröße | L3090mm×W1000mm×H3360mm(Neues Modell) | |
| Stapelhöhe | 1900 mm | |
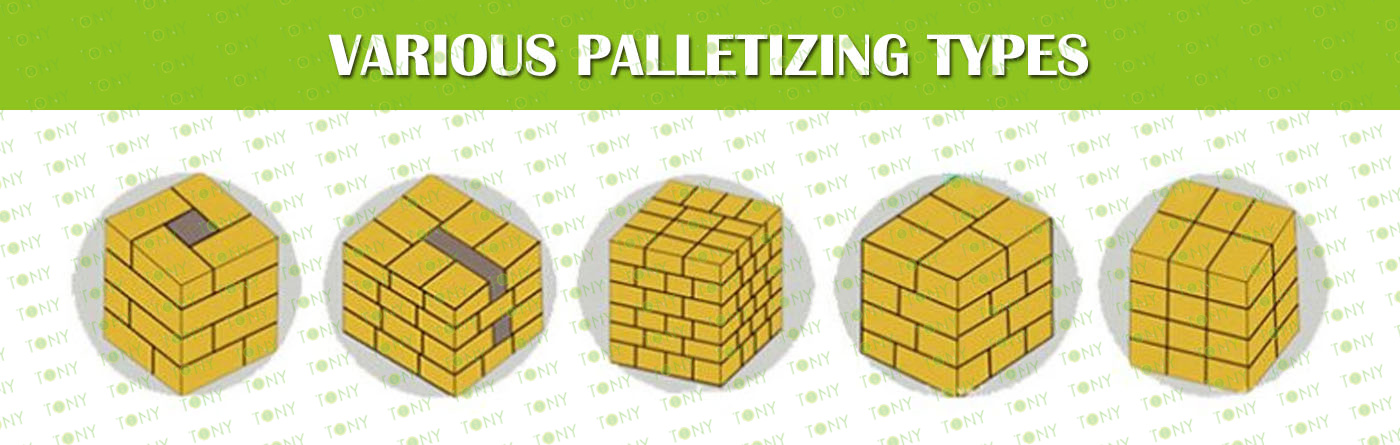
| Stapelform | Fünfblütig, sechsblütig usw. | |
| Luftversorgungsdruck | 0,6-0,8 mA | |
| Ausrüstungsgewicht | 1400 kg | |
| Palletizername und Modell | GJ-LZ400 |
| Bewegungsfreiheit (Achse) | 4 |
| Maximale Belastungskapazität (kg) | 80 |
| Wiederholen Sie die Positionierungsgenauigkeit (MM) | ±1 mm |
| Antriebsmodus | Servo Drive |
| Träger | Klemme |
| Palletisierungsgedächtnis | Intelligentes Gedächtnis |
| Maximale Abdeckung (MM) | 2350 |
| Maximale Abdeckung (MM) | 925 |

|
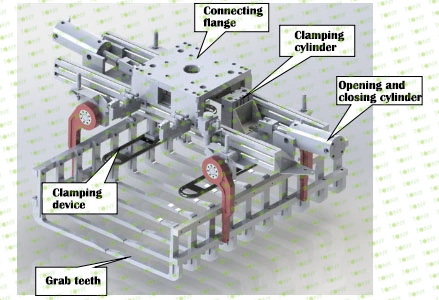
1. GripperTyp und Geräte: Es nimmt eine Klaue - Finger -Sonderbeutel Gripper an. Es ist mit einem pneumatischen Klemmgerät und einem pneumatischen Öffnungs-/Schließgerät ausgestattet. 2. Rahmenstruktur: Der gesamte Rahmen besteht aus Aluminiumprofilen. Es hat eine solide Struktur, die einen stabilen und zuverlässigen Griffprozess gewährleistet. 3. Verstellbare Grabzähne: Die Grabzähne auf beiden Seiten des Greifers können manuell eingestellt werden. Diese Anpassung kann die Anforderungen verschiedener Spezifikationsbeutel erfüllen. 4. Zähnematerial und Abstand schnappen: Die Grabzähne bestehen aus Aluminiumlegierung. Der Abstand von Grab -Zähnen stimmt mit der Mittelstrecke der Codemaschinenrolle überein. |
|
|
|
|

| Greifstruktur | Klauenfinger -Spezialbeutel Gripper |
| Verbindungsmethode mit Roboter | Flanschverbindung |
| Klemmgerätestrich (MM) | 150 |
| Öffnungs-/Schließvorsprachhub (MM) | 200 |
| Antriebsmethode | Zylinderantrieb |
| Markenkonfiguration für pneumatische Komponenten | Japan SMC |
| Anwendbare Produktspezifikationen | Basierend auf den vom Kunden bereitgestellten Produktspezifikationen |

|
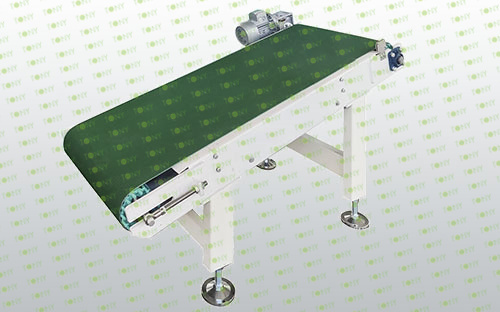
Der Klettergürtel -Förderer transportiert Materialien von einem niedrigen Platz bis zur erforderlichen Höhe. Es besteht hauptsächlich aus einem Rahmen, einem Förderband, Rollen, Walzen, Spannungsvorrichtungen, Getriebegeräten usw. Der Rahmen besteht aus hochwertigem Kohlenstoffstahl mit einer sprühbeschichteten Oberfläche, einer festen und zuverlässigen Struktur und einer Plattendicke von 3,5 bis 4 mm. Führungsplatten auf beiden Seiten können die Position der Führungsplatten eingestellt werden. Hochwertige PVC-Gürtel werden zum reibungslosen Transport verwendet. Angetrieben von einem bekannten motorischen Markenmotor; Etwa L1600 × W650 (effektive Breite) × H370 ~ H900, Höhe einstellbar ± 50 mm; Eine photoelektrische Erkennungspositionierungsvorrichtung ist am Ende des Förderers eingestellt. Photoelektrischer Erkennungsschalter: Omron oder äquivalente Marke Der Motor muss mit einer Schutzabdeckung bedeckt sein, die korrosionsbeständig sein muss, um zu verhindern, dass das Material den Motor korrodiert |
||||||||||||||||||||||
| Verwandte Konfiguration | ||||||||||||||||||||||
 |
|
|||||||||||||||||||||

|
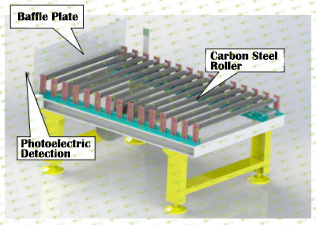
Der Code-Waiting Roller-Förderer wird verwendet, um den Materialbeutel vor dem Greifen zu lokalisieren und zu erkennen und dem Roboter das In-Positions-Signal zum Greifen zu liefern. Die Hauptstruktur und Parameter sind wie folgt: Der Rahmen besteht aus Kohlenstoffstahlprofilen, die Struktur ist fest und zuverlässig und die Plattendicke beträgt 3-4 mm. Die Walze besteht aus RACKET Carbon Stahlrolle. Es wird von einem bekannten Inlandsmotor angetrieben. Die Förderhöhe beträgt 900 ± 50 mm einstellbar; Die Gesamtabmessungen des Förderers sind ungefähr L1040 × W650mm (effektive Breite); Eine fotoelektrische Erkennungs-In-Position-Gerät ist am Ende des Förderers eingestellt. Photoelektrischer Erkennungsschalter: Omron oder äquivalente Marke Der Motor muss mit einer Schutzabdeckung bedeckt sein, die korrosionsbeständig sein muss, um zu verhindern, dass das Material den Motor korrodiert |
||||||||||||||||
| Verwandte Konfiguration | ||||||||||||||||
 |
|
|||||||||||||||

|
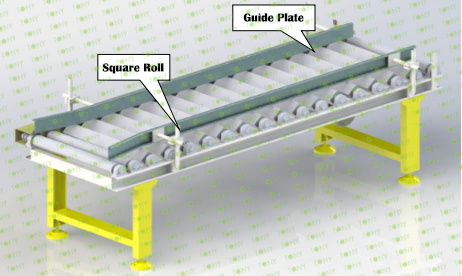
Der Quadratwalzenforming -Förderer verwendet die von der Quadratwalze erzeugte Schwingung, um das Material gleichmäßig in den Beutel zu verteilen und den Beutel als Ganzes flach zu machen. Die Hauptstruktur und Parameter sind wie folgt: Der Rahmen besteht aus Stahl, die Struktur ist fest und zuverlässig und die Plattendicke beträgt 3-4 mm. Die Führungsplatten auf beiden Seiten bestehen aus Kohlenstoffstahl, und die Position der Führungsplatten ist einstellbar. Die Fördererwalzen bestehen aus Kohlenstoffstahlwalzen mit einer glatten Oberfläche. Es wird von einem bekannten Inlandsmotor angetrieben. Die Förderhöhe beträgt 900 ± 50 mm einstellbar; Die Gesamtabmessungen des Formungsförderers betragen ungefähr L2000 × W650mm (effektive Breite der Walze); Eine photoelektrische Erkennungspositionierungsvorrichtung ist am Ende des Förderers eingestellt. Photoelektrischer Erkennungsschalter: Omron oder äquivalente Marke Der Motor muss mit einer Schutzabdeckung bedeckt sein, die korrosionsbeständig sein muss, um zu verhindern, dass das Material den Motor korrodiert. Aussehen der Quadratwalzenformingmaschine |
|||||||||||||||||||
 |
|
||||||||||||||||||

|
1. Netzteil (Einzelproduktionslinie) Stromversorgungsspannung: AC380V ± 10% 50 Hz Steuerung der Steuerung: DC24V Stromverbrauch: ~ 8 kW |
2. Luftversorgung (Einzelproduktionslinie) Standardinstrumenteluft Druck: 0,4 ~ 0,6 MPa Luftverbrauch: 3 ~ 5 nm3/h |
|
3. Umwelt Temperatur: -10 ~+50 ℃ Luftfeuchtigkeit: ≤ 90% (keine Kondensation) |
4. Boden Dicke: ≥ 18 cm Standardbeton |


|
24 Stunden Online -Service. -Inquiry wird innerhalb von 2 Stunden beantwortet. -Allauf-Weg-Tracking-Service, die von der Bestellung der Lieferung angeboten werden. -Freie Schulung für Betrieb, Debuggen und tägliche Wartung. -Wir können eine professionelle Installation von Leitfaden anbieten. -Einjährige Garantie und Allround-After-Sales-Service. -Customized Design und Flow -Diagramm sind für unsere Kunden verfügbar. -Unabhängiges Forschungs- und Entwicklungsteam und ein strenges und wissenschaftliches Managementsystem |
 |





2025 Tony Machinery - Alle Rechte vorbehalten. Karte